CPU Exception'ları
Çevrilmiş İçerik: Bu, CPU Exceptions adlı gönderinin topluluk tarafından yapılmış bir çevirisidir. Eksik, güncel olmayan veya hata içeriyor olabilir. Lütfen herhangi bir sorunu bildirin!
Translation by @rhotav.
CPU exception’ları çeşitli hatalı durumlarda meydana gelir; örneğin geçersiz bir bellek adresine erişilirken veya sıfıra bölünürken. Onlara tepki verebilmek için, handler fonksiyonları sağlayan bir interrupt descriptor table kurmamız gerekir. Bu yazının sonunda, kernel’imiz breakpoint exception’larını yakalayabilecek ve sonrasında normal çalıştırmaya devam edebilecek.
Bu blog GitHub üzerinde açık biçimde geliştirilmektedir. Herhangi bir sorun veya sorunuz varsa lütfen orada bir issue açın. Ayrıca sayfanın en altına yorum bırakabilirsiniz. Bu yazının eksiksiz kaynak kodu post-05 dalında bulunabilir.
İçindekiler
🔗Genel Bakış
Bir exception, mevcut komutla ilgili bir şeyin yanlış olduğunu bildirir. Örneğin, mevcut komut 0’a bölmeye çalışırsa CPU bir exception verir. Bir exception meydana geldiğinde, CPU mevcut işini keser ve exception tipine bağlı olarak hemen belirli bir exception handler fonksiyonunu çağırır.
x86’da yaklaşık 20 farklı CPU exception tipi vardır. En önemlileri şunlardır:
- Page Fault: Bir page fault, yasa dışı bellek erişimlerinde meydana gelir. Örneğin, mevcut komut eşlenmemiş bir sayfadan okumaya veya salt okunur bir sayfaya yazmaya çalışırsa.
- Invalid Opcode: Bu exception, mevcut komut geçersiz olduğunda meydana gelir; örneğin, yeni SSE komutlarını bunları desteklemeyen eski bir CPU’da kullanmaya çalıştığımızda.
- General Protection Fault: Bu, en geniş neden yelpazesine sahip exception’dır. Çeşitli erişim ihlallerinde meydana gelir; örneğin kullanıcı seviyesindeki kodda ayrıcalıklı bir komut çalıştırmaya çalışmak veya yapılandırma register’larındaki ayrılmış alanlara yazmak gibi.
- Double Fault: Bir exception meydana geldiğinde, CPU karşılık gelen handler fonksiyonunu çağırmaya çalışır. Exception handler çağrılırken başka bir exception meydana gelirse, CPU bir double fault exception’ı yükseltir. Bu exception, bir exception için kayıtlı bir handler fonksiyonu olmadığında da meydana gelir.
- Triple Fault: CPU double fault handler fonksiyonunu çağırmaya çalışırken bir exception meydana gelirse, ölümcül bir triple fault verir. Bir triple fault’u yakalayamaz veya işleyemeyiz. Çoğu işlemci buna kendini sıfırlayarak ve işletim sistemini yeniden başlatarak tepki verir.
Exception’ların tam listesi için OSDev wiki’sine göz atın.
🔗Interrupt Descriptor Table
Exception’ları yakalamak ve işlemek için, Interrupt Descriptor Table (IDT) adı verilen bir tablo kurmamız gerekir. Bu tabloda, her CPU exception’ı için bir handler fonksiyonu belirtebiliriz. Donanım bu tabloyu doğrudan kullanır, bu yüzden önceden tanımlanmış bir biçimi takip etmemiz gerekir. Her girdi aşağıdaki 16 baytlık yapıya sahip olmalıdır:
| Tip | Ad | Açıklama |
|---|---|---|
| u16 | Function Pointer [0:15] | Handler fonksiyonuna işaretçinin alt bitleri. |
| u16 | GDT seçicisi | Global descriptor table’daki bir kod segmentinin seçicisi. |
| u16 | Options | (aşağıya bakın) |
| u16 | Function Pointer [16:31] | Handler fonksiyonuna işaretçinin orta bitleri. |
| u32 | Function Pointer [32:63] | Handler fonksiyonuna işaretçinin kalan bitleri. |
| u32 | Reserved |
Options alanı aşağıdaki biçime sahiptir:
| Bitler | Ad | Açıklama |
|---|---|---|
| 0-2 | Interrupt Stack Table Index | 0: Stack’leri değiştirme, 1-7: Bu handler çağrıldığında Interrupt Stack Table’daki n. stack’e geç. |
| 3-7 | Reserved | |
| 8 | 0: Interrupt Gate, 1: Trap Gate | Bu bit 0 ise, bu handler çağrıldığında interrupt’lar devre dışı bırakılır. |
| 9-11 | bir olmalı | |
| 12 | sıfır olmalı | |
| 13‑14 | Descriptor Privilege Level (DPL) | Bu handler’ı çağırmak için gereken minimum ayrıcalık seviyesi. |
| 15 | Present |
Her exception’ın önceden tanımlanmış bir IDT indeksi vardır. Örneğin, invalid opcode exception’ının tablo indeksi 6, page fault exception’ının ise tablo indeksi 14’tür. Böylece donanım, her exception için karşılık gelen IDT girdisini otomatik olarak yükleyebilir. OSDev wiki’sindeki Exception Table, tüm exception’ların IDT indekslerini “Vector nr.” sütununda gösterir.
Bir exception meydana geldiğinde, CPU kabaca şunları yapar:
- Komut işaretçisi (instruction pointer) ve RFLAGS register’ı dahil olmak üzere bazı register’ları stack’e push’lar. (Bu değerleri bu yazının ilerleyen kısmında kullanacağız.)
- Interrupt Descriptor Table’dan (IDT) karşılık gelen girdiyi okur. Örneğin, bir page fault meydana geldiğinde CPU 14. girdiyi okur.
- Girdinin mevcut olup olmadığını kontrol eder ve değilse bir double fault yükseltir.
- Girdi bir interrupt gate ise (bit 40 ayarlanmamışsa) donanım interrupt’larını devre dışı bırakır.
- Belirtilen GDT seçicisini CS’ye (kod segmenti) yükler.
- Belirtilen handler fonksiyonuna atlar.
Şimdilik 4. ve 5. adımlar için endişelenmeyin; global descriptor table’ı ve donanım interrupt’larını gelecekteki yazılarda öğreneceğiz.
🔗Bir IDT Tipi
Kendi IDT tipimizi oluşturmak yerine, x86_64 crate’inin şöyle görünen InterruptDescriptorTable struct’ını kullanacağız:
#[repr(C)]
pub struct InterruptDescriptorTable {
pub divide_by_zero: Entry<HandlerFunc>,
pub debug: Entry<HandlerFunc>,
pub non_maskable_interrupt: Entry<HandlerFunc>,
pub breakpoint: Entry<HandlerFunc>,
pub overflow: Entry<HandlerFunc>,
pub bound_range_exceeded: Entry<HandlerFunc>,
pub invalid_opcode: Entry<HandlerFunc>,
pub device_not_available: Entry<HandlerFunc>,
pub double_fault: Entry<HandlerFuncWithErrCode>,
pub invalid_tss: Entry<HandlerFuncWithErrCode>,
pub segment_not_present: Entry<HandlerFuncWithErrCode>,
pub stack_segment_fault: Entry<HandlerFuncWithErrCode>,
pub general_protection_fault: Entry<HandlerFuncWithErrCode>,
pub page_fault: Entry<PageFaultHandlerFunc>,
pub x87_floating_point: Entry<HandlerFunc>,
pub alignment_check: Entry<HandlerFuncWithErrCode>,
pub machine_check: Entry<HandlerFunc>,
pub simd_floating_point: Entry<HandlerFunc>,
pub virtualization: Entry<HandlerFunc>,
pub security_exception: Entry<HandlerFuncWithErrCode>,
// bazı alanlar atlandı
}Alanlar, bir IDT girdisinin alanlarını temsil eden bir struct olan idt::Entry<F> tipine sahiptir (yukarıdaki tabloya bakın). Tip parametresi F, beklenen handler fonksiyon tipini tanımlar. Bazı girdilerin bir HandlerFunc, bazı girdilerin ise bir HandlerFuncWithErrCode gerektirdiğini görüyoruz. Page fault’un kendine ait özel bir tipi bile var: PageFaultHandlerFunc.
Önce HandlerFunc tipine bakalım:
type HandlerFunc = extern "x86-interrupt" fn(_: InterruptStackFrame);Bu, bir extern "x86-interrupt" fn tipi için bir tip takma adıdır (type alias). extern anahtar kelimesi, yabancı bir çağırma kuralına (foreign calling convention) sahip bir fonksiyon tanımlar ve genellikle C koduyla iletişim kurmak için kullanılır (extern "C" fn). Peki x86-interrupt çağırma kuralı nedir?
🔗Interrupt Çağırma Kuralı
Exception’lar fonksiyon çağrılarına oldukça benzer: CPU, çağrılan fonksiyonun ilk komutuna atlar ve onu çalıştırır. Sonrasında CPU dönüş adresine atlar ve üst fonksiyonun çalıştırılmasına devam eder.
Ancak exception’lar ile fonksiyon çağrıları arasında büyük bir fark vardır: Bir fonksiyon çağrısı, derleyici tarafından eklenen bir call komutuyla gönüllü olarak başlatılır; bir exception ise herhangi bir komutta meydana gelebilir. Bu farkın sonuçlarını anlamak için, fonksiyon çağrılarını daha ayrıntılı incelememiz gerekir.
Çağırma kuralları (calling conventions) bir fonksiyon çağrısının ayrıntılarını belirtir. Örneğin, fonksiyon parametrelerinin nereye yerleştirildiğini (örneğin register’lara mı yoksa stack’e mi) ve sonuçların nasıl döndürüldüğünü belirtirler. x86_64 Linux’ta, C fonksiyonları için aşağıdaki kurallar geçerlidir (System V ABI’de belirtilmiştir):
- ilk altı tamsayı argümanı
rdi,rsi,rdx,rcx,r8,r9register’larında geçirilir - ek argümanlar stack’te geçirilir
- sonuçlar
raxverdx’te döndürülür
Rust’ın C ABI’sini takip etmediğini unutmayın (aslında henüz bir Rust ABI’si bile yok), bu yüzden bu kurallar yalnızca extern "C" fn olarak bildirilen fonksiyonlar için geçerlidir.
🔗Korunan ve Scratch Register’lar
Çağırma kuralı register’ları iki bölüme ayırır: korunan (preserved) ve scratch register’lar.
Korunan register’ların değerleri fonksiyon çağrıları boyunca değişmeden kalmalıdır. Yani çağrılan bir fonksiyonun (“callee”) bu register’ların üzerine yazmasına yalnızca, geri dönmeden önce orijinal değerlerini geri yüklemesi koşuluyla izin verilir. Bu nedenle bu register’lara “callee-saved” denir. Yaygın bir örüntü, bu register’ları fonksiyonun başında stack’e kaydetmek ve geri dönmeden hemen önce geri yüklemektir.
Buna karşılık, çağrılan bir fonksiyonun scratch register’ların üzerine kısıtlama olmadan yazmasına izin verilir. Çağıran fonksiyon (caller), bir scratch register’ının değerini bir fonksiyon çağrısı boyunca korumak isterse, onu fonksiyon çağrısından önce yedeklemesi ve geri yüklemesi gerekir (örneğin onu stack’e push’layarak). Yani scratch register’lar caller-saved’dır.
x86_64’te, C çağırma kuralı aşağıdaki korunan ve scratch register’ları belirtir:
| korunan register’lar | scratch register’lar |
|---|---|
rbp, rbx, rsp, r12, r13, r14, r15 | rax, rcx, rdx, rsi, rdi, r8, r9, r10, r11 |
| callee-saved | caller-saved |
Derleyici bu kuralları bilir, bu yüzden kodu buna göre üretir. Örneğin, çoğu fonksiyon rbp’yi stack’e yedekleyen bir push rbp ile başlar (çünkü o bir callee-saved register’dır).
🔗Tüm Register’ları Korumak
Fonksiyon çağrılarının aksine, exception’lar herhangi bir komutta meydana gelebilir. Çoğu durumda, üretilen kodun bir exception’a neden olup olmayacağını derleme zamanında bile bilemeyiz. Örneğin, derleyici bir komutun stack taşmasına mı yoksa page fault’a mı neden olduğunu bilemez.
Bir exception’ın ne zaman meydana geleceğini bilmediğimiz için, öncesinde hiçbir register’ı yedekleyemeyiz. Bu, exception handler’lar için caller-saved register’lara dayanan bir çağırma kuralı kullanamayacağımız anlamına gelir. Bunun yerine, tüm register’ları koruyan bir çağırma kuralına ihtiyacımız var. x86-interrupt çağırma kuralı böyle bir çağırma kuralıdır, bu yüzden fonksiyon dönüşünde tüm register değerlerinin orijinal değerlerine geri yüklenmesini garanti eder.
Bunun, tüm register’ların fonksiyon girişinde stack’e kaydedildiği anlamına gelmediğini unutmayın. Bunun yerine, derleyici yalnızca fonksiyon tarafından üzerine yazılan register’ları yedekler. Bu sayede, yalnızca birkaç register kullanan kısa fonksiyonlar için çok verimli kod üretilebilir.
🔗Interrupt Stack Frame
Normal bir fonksiyon çağrısında (call komutu kullanılarak), CPU hedef fonksiyona atlamadan önce dönüş adresini push’lar. Fonksiyon dönüşünde (ret komutu kullanılarak), CPU bu dönüş adresini pop’lar ve ona atlar. Yani normal bir fonksiyon çağrısının stack frame’i şöyle görünür:

Ancak exception ve interrupt handler’ları için, yalnızca bir dönüş adresi push’lamak yeterli olmazdı; çünkü interrupt handler’ları genellikle farklı bir bağlamda (stack pointer, CPU bayrakları vb.) çalışır. Bunun yerine, bir interrupt meydana geldiğinde CPU aşağıdaki adımları gerçekleştirir:
- Eski stack pointer’ı kaydetmek: CPU, stack pointer (
rsp) ve stack segment (ss) register değerlerini okur ve onları dahili bir arabellekte hatırlar. - Stack pointer’ı hizalamak: Bir interrupt herhangi bir komutta meydana gelebilir, bu yüzden stack pointer da herhangi bir değere sahip olabilir. Ancak bazı CPU komutları (örneğin bazı SSE komutları) stack pointer’ın 16 baytlık bir sınırda hizalanmasını gerektirir, bu yüzden CPU interrupt’tan hemen sonra böyle bir hizalama gerçekleştirir.
- Stack’leri değiştirmek (bazı durumlarda): CPU ayrıcalık seviyesi değiştiğinde bir stack değişimi meydana gelir; örneğin, bir kullanıcı modu programında bir CPU exception’ı oluştuğunda. Interrupt Stack Table adı verilen şey kullanılarak (bir sonraki yazıda açıklanacak) belirli interrupt’lar için stack değişimleri yapılandırmak da mümkündür.
- Eski stack pointer’ı push’lamak: CPU, 0. adımdaki
rspvessdeğerlerini stack’e push’lar. Bu, bir interrupt handler’dan dönerken orijinal stack pointer’ın geri yüklenmesini mümkün kılar. RFLAGSregister’ını push’lamak ve güncellemek:RFLAGSregister’ı çeşitli kontrol ve durum bitleri içerir. Interrupt girişinde, CPU bazı bitleri değiştirir ve eski değeri push’lar.- Komut işaretçisini push’lamak: Interrupt handler fonksiyonuna atlamadan önce, CPU komut işaretçisini (
rip) ve kod segmentini (cs) push’lar. Bu, normal bir fonksiyon çağrısının dönüş adresi push’lamasına benzer. - Bir hata kodu push’lamak (bazı exception’lar için): Page fault gibi bazı belirli exception’lar için, CPU exception’ın nedenini açıklayan bir hata kodu push’lar.
- Interrupt handler’ı çağırmak: CPU, interrupt handler fonksiyonunun adresini ve segment tanımlayıcısını IDT’deki karşılık gelen alandan okur. Ardından, bu değerleri
ripvecsregister’larına yükleyerek bu handler’ı çağırır.
Yani interrupt stack frame şöyle görünür:

x86_64 crate’inde, interrupt stack frame InterruptStackFrame struct’ı ile temsil edilir. Interrupt handler’larına &mut olarak geçirilir ve exception’ın nedeni hakkında ek bilgi almak için kullanılabilir. Yalnızca birkaç exception bir hata kodu push’ladığından, struct’ta hata kodu alanı yoktur. Bu exception’lar, ek bir error_code argümanına sahip olan ayrı HandlerFuncWithErrCode fonksiyon tipini kullanır.
🔗Perde Arkası
x86-interrupt çağırma kuralı, exception işleme sürecinin neredeyse tüm dağınık ayrıntılarını gizleyen güçlü bir soyutlamadır. Ancak bazen perde arkasında ne olduğunu bilmek yararlıdır. İşte x86-interrupt çağırma kuralının hallettiği şeylerin kısa bir özeti:
- Argümanları almak: Çoğu çağırma kuralı, argümanların register’larda geçirilmesini bekler. Bu, exception handler’lar için mümkün değildir, çünkü register değerlerini stack’e yedeklemeden önce hiçbirinin üzerine yazmamalıyız. Bunun yerine,
x86-interruptçağırma kuralı, argümanların belirli bir ofsette zaten stack’te bulunduğunun farkındadır. iretqkullanarak geri dönmek: Interrupt stack frame, normal fonksiyon çağrılarının stack frame’lerinden tamamen farklı olduğundan, handler fonksiyonlarından normalretkomutuyla geri dönemeyiz. Bu yüzden bunun yerineiretqkomutunun kullanılması gerekir.- Hata kodunu işlemek: Bazı exception’lar için push’lanan hata kodu işleri çok daha karmaşık hale getirir. Stack hizalamasını değiştirir (sonraki maddeye bakın) ve geri dönmeden önce stack’ten pop’lanması gerekir.
x86-interruptçağırma kuralı tüm bu karmaşıklığı halleder. Ancak hangi handler fonksiyonunun hangi exception için kullanıldığını bilmez, bu yüzden bu bilgiyi fonksiyon argümanlarının sayısından çıkarması gerekir. Bu da, her exception için doğru fonksiyon tipini kullanmaktan programcının hâlâ sorumlu olduğu anlamına gelir. Neyse ki,x86_64crate’i tarafından tanımlananInterruptDescriptorTabletipi doğru fonksiyon tiplerinin kullanılmasını sağlar. - Stack’i hizalamak: Bazı komutlar (özellikle SSE komutları) 16 baytlık bir stack hizalaması gerektirir. CPU, bir exception meydana geldiğinde bu hizalamayı sağlar, ancak bazı exception’lar için bir hata kodu push’ladığında onu daha sonra tekrar bozar.
x86-interruptçağırma kuralı, bu durumda stack’i yeniden hizalayarak bununla ilgilenir.
Daha fazla ayrıntıyla ilgileniyorsanız, exception işlemeyi naked fonksiyonlar kullanarak açıklayan ve bu yazının sonunda bağlantısı verilen bir yazı dizimiz de var.
🔗Uygulama
Artık teoriyi anladığımıza göre, kernel’imizde CPU exception’larını işlemenin zamanı geldi. src/interrupts.rs dosyasında, önce yeni bir InterruptDescriptorTable oluşturan bir init_idt fonksiyonu oluşturan yeni bir interrupts modülü oluşturarak başlayacağız:
// src/lib.rs içinde
pub mod interrupts;
// src/interrupts.rs içinde
use x86_64::structures::idt::InterruptDescriptorTable;
pub fn init_idt() {
let mut idt = InterruptDescriptorTable::new();
}Artık handler fonksiyonları ekleyebiliriz. Breakpoint exception için bir handler ekleyerek başlıyoruz. Breakpoint exception’ı, exception işlemeyi test etmek için mükemmel bir exception’dır. Tek amacı, int3 breakpoint komutu çalıştırıldığında bir programı geçici olarak duraklatmaktır.
Breakpoint exception’ı genellikle hata ayıklayıcılarda (debugger) kullanılır: Kullanıcı bir breakpoint belirlediğinde, hata ayıklayıcı karşılık gelen komutun üzerine int3 komutunu yazar; böylece CPU o satıra ulaştığında breakpoint exception’ını fırlatır. Kullanıcı programa devam etmek istediğinde, hata ayıklayıcı int3 komutunu tekrar orijinal komutla değiştirir ve programa devam eder. Daha fazla ayrıntı için “Hata ayıklayıcılar nasıl çalışır” dizisine bakın.
Bizim kullanım senaryomuz için hiçbir komutun üzerine yazmamıza gerek yok. Bunun yerine, yalnızca breakpoint komutu çalıştırıldığında bir mesaj yazdırmak ve ardından programa devam etmek istiyoruz. O halde basit bir breakpoint_handler fonksiyonu oluşturup onu IDT’mize ekleyelim:
// src/interrupts.rs içinde
use x86_64::structures::idt::{InterruptDescriptorTable, InterruptStackFrame};
use crate::println;
pub fn init_idt() {
let mut idt = InterruptDescriptorTable::new();
idt.breakpoint.set_handler_fn(breakpoint_handler);
}
extern "x86-interrupt" fn breakpoint_handler(
stack_frame: InterruptStackFrame)
{
println!("EXCEPTION: BREAKPOINT\n{:#?}", stack_frame);
}Handler’ımız yalnızca bir mesaj çıktılar ve interrupt stack frame’i okunaklı biçimde yazdırır.
Onu derlemeye çalıştığımızda, aşağıdaki hata oluşur:
error[E0658]: x86-interrupt ABI is experimental and subject to change (see issue #40180)
--> src/main.rs:53:1
|
53 | / extern "x86-interrupt" fn breakpoint_handler(stack_frame: InterruptStackFrame) {
54 | | println!("EXCEPTION: BREAKPOINT\n{:#?}", stack_frame);
55 | | }
| |_^
|
= help: add #![feature(abi_x86_interrupt)] to the crate attributes to enableBu hata, x86-interrupt çağırma kuralının hâlâ kararsız olması nedeniyle oluşur. Yine de onu kullanmak için, lib.rs dosyamızın başına #![feature(abi_x86_interrupt)] ekleyerek onu açıkça etkinleştirmemiz gerekir.
🔗IDT’yi Yüklemek
CPU’nun yeni interrupt descriptor table’ımızı kullanabilmesi için, onu lidt komutunu kullanarak yüklememiz gerekir. x86_64 crate’inin InterruptDescriptorTable struct’ı bunun için bir load metodu sağlar. Onu kullanmayı deneyelim:
// src/interrupts.rs içinde
pub fn init_idt() {
let mut idt = InterruptDescriptorTable::new();
idt.breakpoint.set_handler_fn(breakpoint_handler);
idt.load();
}Onu şimdi derlemeye çalıştığımızda, aşağıdaki hata oluşur:
error: `idt` does not live long enough
--> src/interrupts/mod.rs:43:5
|
43 | idt.load();
| ^^^ does not live long enough
44 | }
| - borrowed value only lives until here
|
= note: borrowed value must be valid for the static lifetime...Yani load metodu bir &'static self bekler; yani programın tüm çalışma süresi boyunca geçerli olan bir referans. Bunun nedeni, biz farklı bir IDT yükleyene kadar CPU’nun bu tabloya her interrupt’ta erişecek olmasıdır. Dolayısıyla 'static’ten daha kısa bir ömür kullanmak, use-after-free hatalarına yol açabilir.
Aslında burada tam olarak olan budur. idt’miz stack’te oluşturulur, bu yüzden yalnızca init fonksiyonunun içinde geçerlidir. Sonrasında, stack belleği başka fonksiyonlar için yeniden kullanılır, bu yüzden CPU rastgele stack belleğini IDT olarak yorumlardı. Neyse ki, InterruptDescriptorTable::load metodu bu ömür gereksinimini fonksiyon tanımında kodlar; böylece Rust derleyicisi bu olası hatayı derleme zamanında önleyebilir.
Bu sorunu düzeltmek için, idt’mizi 'static ömrüne sahip olduğu bir yerde saklamamız gerekir. Bunu başarmak için, IDT’mizi Box kullanarak heap’te ayırabilir ve ardından onu bir 'static referansına dönüştürebilirdik; ancak biz bir OS kernel’i yazıyoruz ve bu yüzden (henüz) bir heap’imiz yok.
Bir alternatif olarak, IDT’yi bir static olarak saklamayı deneyebilirdik:
static IDT: InterruptDescriptorTable = InterruptDescriptorTable::new();
pub fn init_idt() {
IDT.breakpoint.set_handler_fn(breakpoint_handler);
IDT.load();
}Ancak bir sorun var: Statics değiştirilemez (immutable), bu yüzden init fonksiyonumuzdan breakpoint girdisini değiştiremeyiz. Bu sorunu bir static mut kullanarak çözebilirdik:
static mut IDT: InterruptDescriptorTable = InterruptDescriptorTable::new();
pub fn init_idt() {
unsafe {
IDT.breakpoint.set_handler_fn(breakpoint_handler);
IDT.load();
}
}Bu varyant hatasız derlenir, ancak deyimsel (idiomatic) olmaktan çok uzaktır. static mut’lar veri yarışlarına çok yatkındır, bu yüzden her erişimde bir unsafe bloğuna ihtiyacımız var.
🔗İmdada Lazy Statics Yetişiyor
Neyse ki, lazy_static makrosu var. Bir static’i derleme zamanında değerlendirmek yerine, makro başlatmayı static’e ilk kez referans verildiğinde gerçekleştirir. Böylece, başlatma bloğunda neredeyse her şeyi yapabilir, hatta çalışma zamanı değerlerini bile okuyabiliriz.
VGA metin arabelleği için bir soyutlama oluşturduğumuzda lazy_static crate’ini zaten içe aktarmıştık. Bu yüzden statik IDT’mizi oluşturmak için doğrudan lazy_static! makrosunu kullanabiliriz:
// src/interrupts.rs içinde
use lazy_static::lazy_static;
lazy_static! {
static ref IDT: InterruptDescriptorTable = {
let mut idt = InterruptDescriptorTable::new();
idt.breakpoint.set_handler_fn(breakpoint_handler);
idt
};
}
pub fn init_idt() {
IDT.load();
}Bu çözümün hiçbir unsafe bloğu gerektirmediğine dikkat edin. lazy_static! makrosu perde arkasında unsafe kullanır, ancak bu güvenli bir arayüzde soyutlanmıştır.
🔗Çalıştırmak
Kernel’imizde exception’ları çalışır hale getirmenin son adımı, init_idt fonksiyonunu main.rs’imizden çağırmaktır. Onu doğrudan çağırmak yerine, lib.rs’imizde genel bir init fonksiyonu sunuyoruz:
// src/lib.rs içinde
pub fn init() {
interrupts::init_idt();
}Bu fonksiyonla, artık main.rs, lib.rs ve entegrasyon testlerimizdeki farklı _start fonksiyonları arasında paylaşılabilecek başlatma rutinleri için merkezi bir yerimiz var.
Artık main.rs’imizin _start fonksiyonunu, init’i çağıracak ve ardından bir breakpoint exception’ı tetikleyecek şekilde güncelleyebiliriz:
// src/main.rs içinde
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
println!("Hello World{}", "!");
blog_os::init(); // yeni
// bir breakpoint exception'ı tetikle
x86_64::instructions::interrupts::int3(); // yeni
// önceki gibi
#[cfg(test)]
test_main();
println!("It did not crash!");
loop {}
}Onu şimdi QEMU’da çalıştırdığımızda (cargo run kullanarak), şunu görüyoruz:
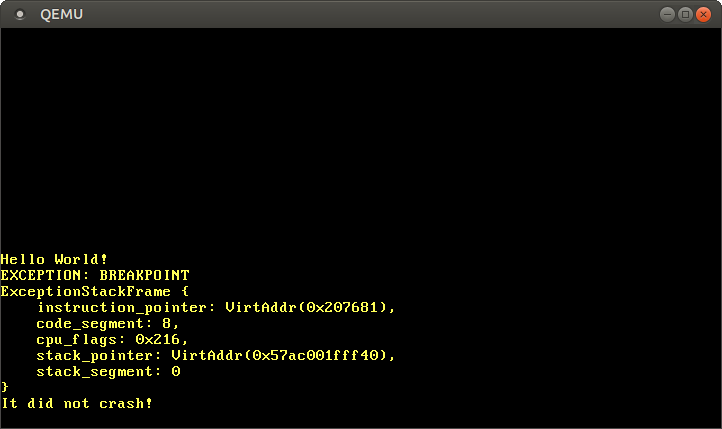
Çalışıyor! CPU, breakpoint handler’ımızı başarıyla çağırıyor; o mesajı yazdırıyor ve ardından _start fonksiyonuna geri dönüyor; burada It did not crash! mesajı yazdırılıyor.
Interrupt stack frame’inin bize, exception meydana geldiği andaki komut ve stack işaretçilerini söylediğini görüyoruz. Bu bilgi, beklenmeyen exception’ların hata ayıklamasında çok yararlıdır.
🔗Bir Test Eklemek
Yukarıdakilerin çalışmaya devam ettiğinden emin olan bir test oluşturalım. İlk olarak, _start fonksiyonunu init’i de çağıracak şekilde güncelliyoruz:
// src/lib.rs içinde
/// `cargo test` için giriş noktası
#[cfg(test)]
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
init(); // yeni
test_main();
loop {}
}Unutmayın, bu _start fonksiyonu cargo test --lib çalıştırılırken kullanılır, çünkü Rust lib.rs’i main.rs’ten tamamen bağımsız olarak test eder. Testleri çalıştırmadan önce bir IDT kurmak için burada init’i çağırmamız gerekir.
Artık bir test_breakpoint_exception testi oluşturabiliriz:
// src/interrupts.rs içinde
#[test_case]
fn test_breakpoint_exception() {
// bir breakpoint exception'ı tetikle
x86_64::instructions::interrupts::int3();
}Test, bir breakpoint exception’ı tetiklemek için int3 fonksiyonunu çağırır. Çalıştırmanın sonrasında devam ettiğini kontrol ederek, breakpoint handler’ımızın doğru çalıştığını doğrularız.
Bu yeni testi cargo test (tüm testler) veya cargo test --lib (yalnızca lib.rs’in ve modüllerinin testleri) çalıştırarak deneyebilirsiniz. Çıktıda şunu görmelisiniz:
blog_os::interrupts::test_breakpoint_exception... [ok]🔗Fazla mı Sihir?
x86-interrupt çağırma kuralı ve InterruptDescriptorTable tipi, exception işleme sürecini nispeten basit ve sancısız hale getirdi. Bu sizin için fazla sihir olduysa ve exception işlemenin tüm kanlı ayrıntılarını öğrenmek istiyorsanız, sizi düşündük: “Naked Fonksiyonlarla Exception İşleme” dizimiz, exception’ların x86-interrupt çağırma kuralı olmadan nasıl işleneceğini gösterir ve ayrıca kendi IDT tipini oluşturur. Tarihsel olarak, bu yazılar x86-interrupt çağırma kuralı ve x86_64 crate’i var olmadan önceki ana exception işleme yazılarıydı. Bu yazıların bu blogun birinci sürümüne dayandığını ve güncel olmayabileceğini unutmayın.
🔗Sırada ne var?
İlk exception’ımızı başarıyla yakaladık ve ondan geri döndük! Sonraki adım, tüm exception’ları yakaladığımızdan emin olmaktır; çünkü yakalanmamış bir exception, sistem sıfırlamasına yol açan ölümcül bir triple fault’a neden olur. Bir sonraki yazı, double fault’ları doğru şekilde yakalayarak bunu nasıl önleyebileceğimizi açıklar.
Yorumlar
Bir sorunuz mu var, geri bildirim paylaşmak veya fikirlerinizi tartışmak mı istiyorsunuz? Buraya yorum bırakmaktan çekinmeyin! Lütfen İngilizce kullanın ve Rust'ın davranış kurallarına uyun. Bu yorum dizisi doğrudan GitHub'daki bir tartışmaya bağlıdır, dolayısıyla isterseniz oraya da yorum yapabilirsiniz.
Instead of authenticating the giscus application, you can also comment directly on GitHub.
Mümkünse yorumlarınızı İngilizce bırakınız.