Test Etme
Çevrilmiş İçerik: Bu, Testing adlı gönderinin topluluk tarafından yapılmış bir çevirisidir. Eksik, güncel olmayan veya hata içeriyor olabilir. Lütfen herhangi bir sorunu bildirin!
Translation by @rhotav.
Bu yazı, no_std çalıştırılabilir dosyalarında birim (unit) ve entegrasyon (integration) testlerini inceliyor. Test fonksiyonlarını kernel’imizin içinde çalıştırmak için Rust’ın özel test çerçevelerine (custom test frameworks) yönelik desteğini kullanacağız. Sonuçları QEMU’dan dışarı raporlamak için QEMU’nun ve bootimage aracının farklı özelliklerini kullanacağız.
Bu blog GitHub üzerinde açık biçimde geliştirilmektedir. Herhangi bir sorun veya sorunuz varsa lütfen orada bir issue açın. Ayrıca sayfanın en altına yorum bırakabilirsiniz. Bu yazının eksiksiz kaynak kodu post-04 dalında bulunabilir.
İçindekiler
🔗Gereksinimler
Bu yazı, (artık kullanımdan kaldırılmış olan) Birim Testi ve Entegrasyon Testleri yazılarının yerini alır. 2019-04-27 tarihinden sonra Minimal Bir Rust Kernel’i yazısını takip etmiş olduğunuzu varsayar. Esas olarak, varsayılan bir hedef belirleyen ve bir runner çalıştırılabilir dosyası tanımlayan bir .cargo/config.toml dosyanızın olmasını gerektirir.
🔗Rust’ta Test Etme
Rust’ın, herhangi bir kurulum yapmaya gerek kalmadan birim testleri çalıştırabilen yerleşik bir test çerçevesi vardır. Yalnızca, bazı sonuçları assertion’lar (doğrulamalar) aracılığıyla kontrol eden bir fonksiyon oluşturmanız ve fonksiyon başlığına #[test] özniteliğini eklemeniz yeterlidir. Ardından cargo test, crate’inizdeki tüm test fonksiyonlarını otomatik olarak bulup çalıştırır.
Kernel ikili dosyamız için testi etkinleştirmek üzere, Cargo.toml dosyasındaki test bayrağını true olarak ayarlayabiliriz:
# Cargo.toml içinde
[[bin]]
name = "blog_os"
test = true
bench = falseBu [[bin]] bölümü, cargo’nun blog_os çalıştırılabilir dosyamızı nasıl derlemesi gerektiğini belirtir.
test alanı, bu çalıştırılabilir dosya için testin desteklenip desteklenmediğini belirtir.
İlk yazıda rust-analyzer’ı mutlu etmek için test = false ayarlamıştık, ancak şimdi testi etkinleştirmek istiyoruz, bu yüzden onu tekrar true olarak ayarlıyoruz.
Ne yazık ki, kernel’imiz gibi no_std uygulamaları için test biraz daha karmaşıktır. Sorun, Rust’ın test çerçevesinin örtük olarak, standart kütüphaneye bağımlı olan yerleşik test kütüphanesini kullanmasıdır. Bu, #[no_std] kernel’imiz için varsayılan test çerçevesini kullanamayacağımız anlamına gelir.
Bunu, projemizde cargo test çalıştırmayı denediğimizde görebiliriz:
> cargo test
Compiling blog_os v0.1.0 (/…/blog_os)
error[E0463]: can't find crate for `test`test crate’i standart kütüphaneye bağımlı olduğundan, bare metal hedefimiz için kullanılamaz. test crate’ini bir #[no_std] bağlamına taşımak mümkün olsa da, bu son derece kararsızdır ve panic makrosunu yeniden tanımlamak gibi bazı hile’ler (hack) gerektirir.
🔗Özel Test Çerçeveleri
Neyse ki Rust, varsayılan test çerçevesinin kararsız custom_test_frameworks özelliği aracılığıyla değiştirilmesini destekler. Bu özellik herhangi bir dış kütüphane gerektirmez ve bu yüzden #[no_std] ortamlarında da çalışır. #[test_case] özniteliğiyle işaretlenmiş tüm fonksiyonları toplayarak ve ardından kullanıcı tarafından belirlenmiş bir runner fonksiyonunu, argüman olarak test listesiyle çağırarak çalışır. Böylece, uygulamaya test süreci üzerinde maksimum kontrol verir.
Varsayılan test çerçevesine kıyasla dezavantajı, should_panic testleri gibi pek çok gelişmiş özelliğin kullanılamamasıdır. Bunun yerine, gerekirse bu tür özellikleri sağlamak uygulamanın kendisine kalmıştır. Bu bizim için idealdir, çünkü çok özel bir çalıştırma ortamımız var ve bu tür gelişmiş özelliklerin varsayılan uygulamaları muhtemelen zaten çalışmazdı. Örneğin, #[should_panic] özniteliği panic’leri yakalamak için stack unwinding’e dayanır; biz ise bunu kernel’imiz için devre dışı bıraktık.
Kernel’imiz için özel bir test çerçevesi uygulamak amacıyla, main.rs dosyamıza aşağıdakileri ekliyoruz:
// src/main.rs içinde
#![feature(custom_test_frameworks)]
#![test_runner(crate::test_runner)]
#[cfg(test)]
pub fn test_runner(tests: &[&dyn Fn()]) {
println!("Running {} tests", tests.len());
for test in tests {
test();
}
}Runner’ımız yalnızca kısa bir hata ayıklama mesajı yazdırır ve ardından listedeki her test fonksiyonunu çağırır. &[&dyn Fn()] argüman tipi, Fn() trait’inin trait nesnesi (trait object) referanslarından oluşan bir dilim (slice)’dir. Temel olarak, bir fonksiyon gibi çağrılabilen tiplere yapılan referansların bir listesidir. Bu fonksiyon test dışı çalıştırmalar için işe yaramaz olduğundan, onu yalnızca testler için dahil etmek üzere #[cfg(test)] özniteliğini kullanıyoruz.
Şimdi cargo test çalıştırdığımızda, artık başarılı olduğunu görüyoruz (olmuyorsa, aşağıdaki nota bakın). Ancak hâlâ test_runner’ımızdan gelen mesaj yerine “Hello World”’ümüzü görüyoruz. Bunun nedeni, _start fonksiyonumuzun hâlâ giriş noktası olarak kullanılmasıdır. Özel test çerçeveleri özelliği, test_runner’ı çağıran bir main fonksiyonu üretir; ancak biz #[no_main] özniteliğini kullanıp kendi giriş noktamızı sağladığımız için bu fonksiyon yok sayılır.
Not: Cargo’da şu anda, bazı durumlarda cargo test’te “duplicate lang item” hatalarına yol açan bir hata (bug) var. Bu hata, Cargo.toml dosyanızda bir profil için panic = "abort" ayarladığınızda oluşur. Onu kaldırmayı deneyin, sonra cargo test çalışmalı. Alternatif olarak, eğer bu işe yaramazsa, .cargo/config.toml dosyanızın [unstable] bölümüne panic-abort-tests = true ekleyin. Bu konuda daha fazla bilgi için cargo issue’ya bakın.
Bunu düzeltmek için, önce üretilen fonksiyonun adını reexport_test_harness_main özniteliği aracılığıyla main’den farklı bir şeye değiştirmemiz gerekir. Ardından, yeniden adlandırılan fonksiyonu _start fonksiyonumuzdan çağırabiliriz:
// src/main.rs içinde
#![reexport_test_harness_main = "test_main"]
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
println!("Hello World{}", "!");
#[cfg(test)]
test_main();
loop {}
}Test çerçevesi giriş fonksiyonunun adını test_main olarak belirliyor ve onu _start giriş noktamızdan çağırıyoruz. test_main çağrısını yalnızca test bağlamlarına eklemek için koşullu derleme (conditional compilation) kullanıyoruz, çünkü bu fonksiyon normal bir çalıştırmada üretilmez.
Şimdi cargo test’i çalıştırdığımızda, ekranda test_runner’ımızdan gelen “Running 0 tests” mesajını görüyoruz. Artık ilk test fonksiyonumuzu oluşturmaya hazırız:
// src/main.rs içinde
#[test_case]
fn trivial_assertion() {
print!("trivial assertion... ");
assert_eq!(1, 1);
println!("[ok]");
}Şimdi cargo test çalıştırdığımızda, aşağıdaki çıktıyı görüyoruz:
![QEMU’da “Hello World!”, “Running 1 tests” ve “trivial assertion… [ok]” yazısı](https://os.phil-opp.com/tr/testing/qemu-test-runner-output.png)
test_runner fonksiyonumuza geçirilen tests dilimi artık trivial_assertion fonksiyonuna bir referans içeriyor. Ekrandaki trivial assertion... [ok] çıktısından, testin çağrıldığını ve başarılı olduğunu görüyoruz.
Testleri çalıştırdıktan sonra, test_runner’ımız test_main fonksiyonuna geri döner; o da sırayla _start giriş noktası fonksiyonumuza geri döner. _start’ın sonunda, giriş noktası fonksiyonunun geri dönmesine izin verilmediği için sonsuz bir döngüye giriyoruz. Bu bir sorundur, çünkü cargo test’in tüm testleri çalıştırdıktan sonra çıkmasını istiyoruz.
🔗QEMU’dan Çıkış
Şu anda _start fonksiyonumuzun sonunda sonsuz bir döngü var ve her cargo test çalıştırmasında QEMU’yu elle kapatmamız gerekiyor. Bu talihsiz bir durumdur, çünkü cargo test’i kullanıcı etkileşimi olmadan betiklerde de çalıştırmak istiyoruz. Bunun temiz çözümü, OS’umuzu kapatmanın düzgün bir yolunu uygulamak olurdu. Ne yazık ki bu nispeten karmaşıktır, çünkü APM veya ACPI güç yönetimi standardından birine yönelik destek uygulamayı gerektirir.
Neyse ki bir kaçış kapısı var: QEMU, misafir (guest) sistemden QEMU’dan çıkmanın kolay bir yolunu sağlayan özel bir isa-debug-exit cihazını destekler. Onu etkinleştirmek için QEMU’ya bir -device argümanı geçirmemiz gerekir. Bunu, Cargo.toml dosyamıza bir package.metadata.bootimage.test-args yapılandırma anahtarı ekleyerek yapabiliriz:
# Cargo.toml içinde
[package.metadata.bootimage]
test-args = ["-device", "isa-debug-exit,iobase=0xf4,iosize=0x04"]bootimage runner, tüm test çalıştırılabilir dosyaları için varsayılan QEMU komutuna test-args’ı ekler. Normal bir cargo run için argümanlar yok sayılır.
Cihaz adıyla (isa-debug-exit) birlikte, cihaza kernel’imizden ulaşılabilecek G/Ç portunu (I/O port) belirten iobase ve iosize parametrelerini geçiriyoruz.
🔗G/Ç Portları
x86’da CPU ile çevresel donanım arasında iletişim kurmak için iki farklı yaklaşım vardır: belleğe eşlenmiş G/Ç (memory-mapped I/O) ve porta eşlenmiş G/Ç (port-mapped I/O). VGA metin arabelleğine 0xb8000 bellek adresi aracılığıyla erişmek için belleğe eşlenmiş G/Ç’yi zaten kullandık. Bu adres RAM’e değil, VGA cihazındaki bir belleğe eşlenmiştir.
Buna karşılık, porta eşlenmiş G/Ç iletişim için ayrı bir G/Ç veri yolu (bus) kullanır. Bağlı her çevresel cihazın bir veya daha fazla port numarası vardır. Böyle bir G/Ç portuyla iletişim kurmak için, bir port numarası ve bir veri baytı alan in ve out adlı özel CPU komutları vardır (bu komutların bir u16 veya u32 göndermeye olanak tanıyan varyasyonları da vardır).
isa-debug-exit cihazı porta eşlenmiş G/Ç kullanır. iobase parametresi cihazın hangi port adresinde bulunması gerektiğini belirtir (0xf4, x86’nın G/Ç veri yolunda genellikle kullanılmayan bir porttur) ve iosize port boyutunu belirtir (0x04, dört bayt anlamına gelir).
🔗Çıkış Cihazını Kullanmak
isa-debug-exit cihazının işlevselliği çok basittir. iobase tarafından belirtilen G/Ç portuna bir value (değer) yazıldığında, QEMU’nun (value << 1) | 1 çıkış durumuyla (exit status) çıkmasına neden olur. Yani porta 0 yazdığımızda QEMU (0 << 1) | 1 = 1 çıkış durumuyla çıkar; porta 1 yazdığımızda ise (1 << 1) | 1 = 3 çıkış durumuyla çıkar.
in ve out assembly komutlarını elle çağırmak yerine, x86_64 crate’inin sağladığı soyutlamaları kullanıyoruz. Bu crate’e bir bağımlılık eklemek için, onu Cargo.toml dosyamızdaki dependencies bölümüne ekliyoruz:
# Cargo.toml içinde
[dependencies]
x86_64 = "0.15.5"Artık bir exit_qemu fonksiyonu oluşturmak için crate’in sağladığı Port tipini kullanabiliriz:
// src/main.rs içinde
#[derive(Debug, Clone, Copy, PartialEq, Eq)]
#[repr(u32)]
pub enum QemuExitCode {
Success = 0x10,
Failed = 0x11,
}
pub fn exit_qemu(exit_code: QemuExitCode) {
use x86_64::instructions::port::Port;
unsafe {
let mut port = Port::new(0xf4);
port.write(exit_code as u32);
}
}Fonksiyon, isa-debug-exit cihazının iobase’i olan 0xf4’te yeni bir Port oluşturur. Ardından, geçirilen çıkış kodunu porta yazar. isa-debug-exit cihazının iosize’ını 4 bayt olarak belirttiğimiz için u32 kullanıyoruz. Bir G/Ç portuna yazmak genellikle keyfi davranışla sonuçlanabileceğinden, her iki işlem de unsafe’tir.
Çıkış durumunu belirtmek için bir QemuExitCode enum’ı oluşturuyoruz. Fikir, tüm testler başarılı olursa başarı çıkış koduyla, aksi takdirde başarısızlık çıkış koduyla çıkmaktır. Enum, her varyantı bir u32 tamsayıyla temsil etmek için #[repr(u32)] olarak işaretlenmiştir. Başarı için 0x10, başarısızlık için 0x11 çıkış kodunu kullanıyoruz. QEMU’nun varsayılan çıkış kodlarıyla çakışmadıkları sürece, gerçek çıkış kodları pek önemli değildir. Örneğin, başarı için 0 çıkış kodunu kullanmak iyi bir fikir değildir, çünkü dönüşümden sonra (0 << 1) | 1 = 1 olur ve bu, QEMU çalışmayı başaramadığında verdiği varsayılan çıkış kodudur. Yani bir QEMU hatasını başarılı bir test çalıştırmasından ayırt edemezdik.
Artık test_runner’ımızı, tüm testler çalıştıktan sonra QEMU’dan çıkacak şekilde güncelleyebiliriz:
// src/main.rs içinde
fn test_runner(tests: &[&dyn Fn()]) {
println!("Running {} tests", tests.len());
for test in tests {
test();
}
/// yeni
exit_qemu(QemuExitCode::Success);
}Şimdi cargo test çalıştırdığımızda, QEMU’nun testleri çalıştırdıktan hemen sonra kapandığını görüyoruz. Sorun şu ki, Success çıkış kodumuzu geçirmemize rağmen cargo test, testi başarısız olmuş gibi yorumluyor:
> cargo test
Finished dev [unoptimized + debuginfo] target(s) in 0.03s
Running target/x86_64-blog_os/debug/deps/blog_os-5804fc7d2dd4c9be
Building bootloader
Compiling bootloader v0.5.3 (/home/philipp/Documents/bootloader)
Finished release [optimized + debuginfo] target(s) in 1.07s
Running: `qemu-system-x86_64 -drive format=raw,file=/…/target/x86_64-blog_os/debug/
deps/bootimage-blog_os-5804fc7d2dd4c9be.bin -device isa-debug-exit,iobase=0xf4,
iosize=0x04`
error: test failed, to rerun pass '--bin blog_os'Sorun, cargo test’in 0 dışındaki tüm hata kodlarını başarısızlık olarak görmesidir.
🔗Başarı Çıkış Kodu
Bunu aşmak için bootimage, belirtilen bir çıkış kodunu 0 çıkış koduyla eşleyen bir test-success-exit-code yapılandırma anahtarı sağlar:
# Cargo.toml içinde
[package.metadata.bootimage]
test-args = […]
test-success-exit-code = 33 # (0x10 << 1) | 1Bu yapılandırmayla bootimage, başarı çıkış kodumuzu çıkış kodu 0’a eşler; böylece cargo test başarı durumunu doğru bir şekilde tanır ve testi başarısız olarak saymaz.
Test runner’ımız artık QEMU’yu otomatik olarak kapatıyor ve test sonuçlarını doğru bir şekilde raporluyor. QEMU penceresinin hâlâ çok kısa bir süre açıldığını görüyoruz, ancak bu süre sonuçları okumaya yetmiyor. Bunun yerine test sonuçlarını konsola yazdırabilseydik güzel olurdu; böylece QEMU çıktıktan sonra da onları görebilirdik.
🔗Konsola Yazdırmak
Test çıktısını konsolda görmek için, verileri kernel’imizden host sistemine bir şekilde göndermemiz gerekiyor. Bunu başarmanın çeşitli yolları vardır; örneğin verileri bir TCP ağ arayüzü üzerinden göndermek gibi. Ancak bir ağ yığını (networking stack) kurmak oldukça karmaşık bir iştir, bu yüzden bunun yerine daha basit bir çözüm seçeceğiz.
🔗Seri Port
Verileri göndermenin basit bir yolu, modern bilgisayarlarda artık bulunmayan eski bir arayüz standardı olan seri portu (serial port) kullanmaktır. Programlanması kolaydır ve QEMU, seri port üzerinden gönderilen baytları host’un standart çıktısına veya bir dosyaya yönlendirebilir.
Bir seri arayüzü uygulayan çiplere UART denir. x86’da pek çok UART modeli vardır, ancak neyse ki aralarındaki tek fark ihtiyaç duymadığımız bazı gelişmiş özelliklerdir. Günümüzdeki yaygın UART’ların hepsi 16550 UART ile uyumludur, bu yüzden test çerçevemiz için o modeli kullanacağız.
UART’ı başlatmak ve verileri seri port üzerinden göndermek için uart_16550 crate’ini kullanacağız. Onu bir bağımlılık olarak eklemek için, Cargo.toml ve main.rs dosyalarımızı güncelliyoruz:
# Cargo.toml içinde
[dependencies]
uart_16550 = "0.6.0"uart_16550 crate’i, UART’ı TTY modunda başlatan ve metni kolayca göndermemize olanak tanıyan bir Uart16550Tty tipi içerir.
Bu tipi yeni bir serial modülünde kullanalım:
// src/main.rs içinde
mod serial;// src/serial.rs içinde
use uart_16550::{Config, Uart16550Tty, backend::PioBackend};
use spin::Mutex;
use lazy_static::lazy_static;
lazy_static! {
pub static ref SERIAL1: Mutex<Uart16550Tty<PioBackend>> = Mutex::new(unsafe {
Uart16550Tty::new_port(0x3F8, Config::default())
.expect("failed to initialize UART")
});
}VGA metin arabelleğinde olduğu gibi, bir static writer örneği oluşturmak için lazy_static ve bir spinlock kullanıyoruz. lazy_static kullanarak, UART’ın ilk kullanımında tam olarak bir kez başlatılmasını sağlayabiliriz.
isa-debug-exit cihazı gibi, UART de port G/Ç’si kullanılarak programlanır; bu da PioBackend parametresiyle belirtilir. UART daha karmaşık olduğu için, farklı cihaz register’larını programlamak amacıyla birden çok G/Ç portu kullanır. Unsafe Uart16550Tty::new_port fonksiyonu, argüman olarak UART’ın ilk G/Ç portunun adresini bekler; bu adresten gereken tüm portların adreslerini hesaplayabilir. Biz, ilk seri arayüz için standart port numarası olan 0x3F8 port adresini geçiriyoruz.
Seri portu kolayca kullanılabilir hale getirmek için, serial_print! ve serial_println! makrolarını ekliyoruz:
// src/serial.rs içinde
#[doc(hidden)]
pub fn _print(args: ::core::fmt::Arguments) {
use core::fmt::Write;
SERIAL1.lock().write_fmt(args).expect("Printing to serial failed");
}
/// Seri arayüz aracılığıyla host'a yazdırır.
#[macro_export]
macro_rules! serial_print {
($($arg:tt)*) => {
$crate::serial::_print(format_args!($($arg)*));
};
}
/// Seri arayüz aracılığıyla host'a, sona bir yeni satır ekleyerek yazdırır.
#[macro_export]
macro_rules! serial_println {
() => ($crate::serial_print!("\n"));
($fmt:expr) => ($crate::serial_print!(concat!($fmt, "\n")));
($fmt:expr, $($arg:tt)*) => ($crate::serial_print!(
concat!($fmt, "\n"), $($arg)*));
}Uygulama, print ve println makrolarımızın uygulamasına çok benzer. Uart16550Tty tipi fmt::Write trait’ini zaten uyguladığı için, kendi uygulamamızı sağlamamıza gerek yok.
Artık test kodumuzda VGA metin arabelleği yerine seri arayüze yazdırabiliriz:
// src/main.rs içinde
#[cfg(test)]
fn test_runner(tests: &[&dyn Fn()]) {
serial_println!("Running {} tests", tests.len());
[…]
}
#[test_case]
fn trivial_assertion() {
serial_print!("trivial assertion... ");
assert_eq!(1, 1);
serial_println!("[ok]");
}#[macro_export] özniteliğini kullandığımız için serial_println makrosunun doğrudan kök ad alanının altında bulunduğunu, bu yüzden onu use crate::serial::serial_println aracılığıyla içe aktarmanın çalışmayacağını unutmayın.
🔗QEMU Argümanları
QEMU’dan gelen seri çıktıyı görmek için, çıktıyı stdout’a yönlendirmek üzere -serial argümanını kullanmamız gerekir:
# Cargo.toml içinde
[package.metadata.bootimage]
test-args = [
"-device", "isa-debug-exit,iobase=0xf4,iosize=0x04", "-serial", "stdio"
]Şimdi cargo test çalıştırdığımızda, test çıktısını doğrudan konsolda görüyoruz:
> cargo test
Finished dev [unoptimized + debuginfo] target(s) in 0.02s
Running target/x86_64-blog_os/debug/deps/blog_os-7b7c37b4ad62551a
Building bootloader
Finished release [optimized + debuginfo] target(s) in 0.02s
Running: `qemu-system-x86_64 -drive format=raw,file=/…/target/x86_64-blog_os/debug/
deps/bootimage-blog_os-7b7c37b4ad62551a.bin -device
isa-debug-exit,iobase=0xf4,iosize=0x04 -serial stdio`
Running 1 tests
trivial assertion... [ok]Ancak bir test başarısız olduğunda, panic handler’ımız hâlâ println kullandığı için çıktıyı yine QEMU’nun içinde görüyoruz. Bunu canlandırmak için, trivial_assertion testimizdeki assertion’ı assert_eq!(0, 1) olarak değiştirebiliriz:
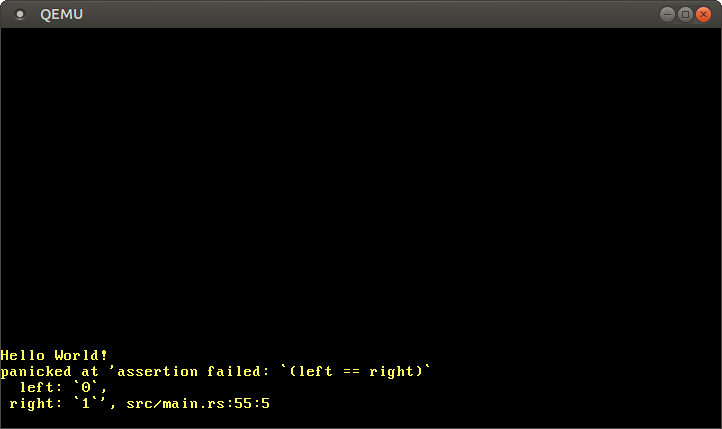
Panic mesajının hâlâ VGA arabelleğine, diğer test çıktısının ise seri porta yazdırıldığını görüyoruz. Panic mesajı oldukça yararlıdır, bu yüzden onu da konsolda görmek faydalı olurdu.
🔗Panic Anında Hata Mesajı Yazdırmak
Bir panic durumunda QEMU’dan bir hata mesajıyla çıkmak için, test modunda farklı bir panic handler kullanmak üzere koşullu derleme kullanabiliriz:
// src/main.rs içinde
// mevcut panic handler'ımız
#[cfg(not(test))] // yeni öznitelik
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
println!("{}", info);
loop {}
}
// test modundaki panic handler'ımız
#[cfg(test)]
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
serial_println!("[failed]\n");
serial_println!("Error: {}\n", info);
exit_qemu(QemuExitCode::Failed);
loop {}
}Test panic handler’ımız için println yerine serial_println kullanıyor ve ardından QEMU’dan bir başarısızlık çıkış koduyla çıkıyoruz. exit_qemu çağrısından sonra hâlâ sonsuz bir loop’a ihtiyacımız olduğunu unutmayın, çünkü derleyici isa-debug-exit cihazının bir program çıkışına neden olduğunu bilmez.
Artık QEMU başarısız testler için de çıkıyor ve konsola yararlı bir hata mesajı yazdırıyor:
> cargo test
Finished dev [unoptimized + debuginfo] target(s) in 0.02s
Running target/x86_64-blog_os/debug/deps/blog_os-7b7c37b4ad62551a
Building bootloader
Finished release [optimized + debuginfo] target(s) in 0.02s
Running: `qemu-system-x86_64 -drive format=raw,file=/…/target/x86_64-blog_os/debug/
deps/bootimage-blog_os-7b7c37b4ad62551a.bin -device
isa-debug-exit,iobase=0xf4,iosize=0x04 -serial stdio`
Running 1 tests
trivial assertion... [failed]
Error: panicked at 'assertion failed: `(left == right)`
left: `0`,
right: `1`', src/main.rs:65:5Artık tüm test çıktısını konsolda gördüğümüz için, kısa bir süre açılan QEMU penceresine artık ihtiyacımız yok. Bu yüzden onu tamamen gizleyebiliriz.
🔗QEMU’yu Gizlemek
Eksiksiz test sonuçlarını isa-debug-exit cihazını ve seri portu kullanarak dışarı raporladığımız için, artık QEMU penceresine ihtiyacımız yok. QEMU’ya -display none argümanını geçirerek onu gizleyebiliriz:
# Cargo.toml içinde
[package.metadata.bootimage]
test-args = [
"-device", "isa-debug-exit,iobase=0xf4,iosize=0x04", "-serial", "stdio",
"-display", "none"
]Artık QEMU tamamen arka planda çalışıyor ve hiçbir pencere açılmıyor. Bu yalnızca daha az can sıkıcı olmakla kalmıyor, aynı zamanda test çerçevemizin CI hizmetleri veya SSH bağlantıları gibi grafiksel bir kullanıcı arayüzü olmayan ortamlarda çalışmasına da olanak tanıyor.
🔗Zaman Aşımları
cargo test, test runner çıkana kadar beklediği için, asla geri dönmeyen bir test, test runner’ı sonsuza dek bloklayabilir. Bu talihsiz bir durumdur, ancak sonsuz döngülerden kaçınmak genellikle kolay olduğu için pratikte büyük bir sorun değildir. Ancak bizim durumumuzda, sonsuz döngüler çeşitli durumlarda meydana gelebilir:
- Bootloader kernel’imizi yüklemeyi başaramaz, bu da sistemin sonsuza dek yeniden başlamasına neden olur.
- BIOS/UEFI firmware’i bootloader’ı yüklemeyi başaramaz, bu da aynı sonsuz yeniden başlatmaya neden olur.
- CPU, örneğin QEMU çıkış cihazı düzgün çalışmadığı için, bazı fonksiyonlarımızın sonunda bir
loop {}ifadesine girer. - Donanım bir sistem sıfırlamasına (reset) neden olur; örneğin bir CPU exception’ı yakalanmadığında (gelecekteki bir yazıda açıklanacak).
Sonsuz döngüler çok fazla durumda meydana gelebileceği için, bootimage aracı her test çalıştırılabilir dosyası için varsayılan olarak 5 dakikalık bir zaman aşımı belirler. Test bu süre içinde bitmezse, başarısız olarak işaretlenir ve konsola bir “Timed Out” hatası yazdırılır. Bu özellik, sonsuz bir döngüde takılı kalan testlerin cargo test’i sonsuza dek bloklamamasını sağlar.
Bunu trivial_assertion testine bir loop {} ifadesi ekleyerek kendiniz deneyebilirsiniz. cargo test çalıştırdığınızda, testin 5 dakika sonra zaman aşımına uğramış olarak işaretlendiğini görürsünüz. Zaman aşımı süresi, Cargo.toml’daki bir test-timeout anahtarı aracılığıyla yapılandırılabilir:
# Cargo.toml içinde
[package.metadata.bootimage]
test-timeout = 300 # (saniye cinsinden)trivial_assertion testinin zaman aşımına uğraması için 5 dakika beklemek istemiyorsanız, yukarıdaki değeri geçici olarak azaltabilirsiniz.
🔗Yazdırmayı Otomatik Eklemek
trivial_assertion testimizin şu anda kendi durum bilgisini serial_print!/serial_println! kullanarak yazdırması gerekiyor:
#[test_case]
fn trivial_assertion() {
serial_print!("trivial assertion... ");
assert_eq!(1, 1);
serial_println!("[ok]");
}Yazdığımız her test için bu yazdırma ifadelerini elle eklemek zahmetlidir, bu yüzden test_runner’ımızı bu mesajları otomatik olarak yazdıracak şekilde güncelleyelim. Bunu yapmak için, yeni bir Testable trait’i oluşturmamız gerekir:
// src/main.rs içinde
pub trait Testable {
fn run(&self) -> ();
}Şimdi işin püf noktası, bu trait’i Fn() trait’ini uygulayan tüm T tipleri için uygulamaktır:
// src/main.rs içinde
impl<T> Testable for T
where
T: Fn(),
{
fn run(&self) {
serial_print!("{}...\t", core::any::type_name::<T>());
self();
serial_println!("[ok]");
}
}run fonksiyonunu, önce any::type_name fonksiyonunu kullanarak fonksiyon adını yazdırarak uyguluyoruz. Bu fonksiyon doğrudan derleyicide uygulanmıştır ve her tipin bir dize açıklamasını döndürür. Fonksiyonlar için tip, onların adıdır; yani bu durumda tam olarak istediğimiz şey budur. \t karakteri, [ok] mesajlarına biraz hizalama ekleyen sekme karakteridir (tab character).
Fonksiyon adını yazdırdıktan sonra, test fonksiyonunu self() aracılığıyla çağırıyoruz. Bu yalnızca, self’in Fn() trait’ini uygulamasını gerektirdiğimiz için çalışır. Test fonksiyonu geri döndükten sonra, fonksiyonun panic yapmadığını belirtmek için [ok] yazdırıyoruz.
Son adım, test_runner’ımızı yeni Testable trait’ini kullanacak şekilde güncellemektir:
// src/main.rs içinde
#[cfg(test)]
pub fn test_runner(tests: &[&dyn Testable]) { // yeni
serial_println!("Running {} tests", tests.len());
for test in tests {
test.run(); // yeni
}
exit_qemu(QemuExitCode::Success);
}Tek iki değişiklik, tests argümanının tipinin &[&dyn Fn()]’ten &[&dyn Testable]’a değişmesi ve artık test() yerine test.run() çağırmamızdır.
Artık trivial_assertion testimizden yazdırma ifadelerini kaldırabiliriz, çünkü artık otomatik olarak yazdırılıyorlar:
// src/main.rs içinde
#[test_case]
fn trivial_assertion() {
assert_eq!(1, 1);
}cargo test çıktısı artık şöyle görünüyor:
Running 1 tests
blog_os::trivial_assertion... [ok]Fonksiyon adı artık fonksiyona giden tam yolu içeriyor; bu, farklı modüllerdeki test fonksiyonları aynı ada sahip olduğunda yararlıdır. Bunun dışında çıktı eskisiyle aynı görünüyor, ancak artık testlerimize yazdırma ifadelerini elle eklememize gerek yok.
🔗VGA Arabelleğini Test Etmek
Artık çalışan bir test çerçevemiz olduğuna göre, VGA arabellek uygulamamız için birkaç test oluşturabiliriz. İlk olarak, println’in panic yapmadan çalıştığını doğrulamak için çok basit bir test oluşturuyoruz:
// src/vga_buffer.rs içinde
#[test_case]
fn test_println_simple() {
println!("test_println_simple output");
}Test yalnızca VGA arabelleğine bir şeyler yazdırır. Panic yapmadan biterse, println çağrısının da panic yapmadığı anlamına gelir.
Çok sayıda satır yazdırılsa ve satırlar ekrandan dışarı kaydırılsa bile bir panic oluşmadığından emin olmak için, başka bir test oluşturabiliriz:
// src/vga_buffer.rs içinde
#[test_case]
fn test_println_many() {
for _ in 0..200 {
println!("test_println_many output");
}
}Yazdırılan satırların gerçekten ekranda göründüğünü doğrulamak için bir test fonksiyonu da oluşturabiliriz:
// src/vga_buffer.rs içinde
#[test_case]
fn test_println_output() {
let s = "Some test string that fits on a single line";
println!("{}", s);
for (i, c) in s.chars().enumerate() {
let screen_char = WRITER.lock().buffer.chars[BUFFER_HEIGHT - 2][i].read();
assert_eq!(char::from(screen_char.ascii_character), c);
}
}Fonksiyon bir test dizesi tanımlar, onu println kullanarak yazdırır ve ardından VGA metin arabelleğini temsil eden statik WRITER’ın ekran karakterleri üzerinde iterasyon yapar. println son ekran satırına yazdırıp hemen ardından bir yeni satır eklediğinden, dize BUFFER_HEIGHT - 2 satırında görünmelidir.
enumerate’i kullanarak, iterasyon sayısını i değişkeninde sayarız; bunu daha sonra c’ye karşılık gelen ekran karakterini yüklemek için kullanırız. Ekran karakterinin ascii_character’ını c ile karşılaştırarak, dizenin her karakterinin gerçekten VGA metin arabelleğinde göründüğünden emin oluruz.
Tahmin edebileceğiniz gibi, çok daha fazla test fonksiyonu oluşturabilirdik. Örneğin, çok uzun satırlar yazdırılırken bir panic oluşmadığını ve bunların doğru şekilde kaydırıldığını test eden bir fonksiyon; ya da yeni satırların, yazdırılamaz karakterlerin ve unicode olmayan karakterlerin doğru işlendiğini test eden bir fonksiyon.
Ancak bu yazının geri kalanında, farklı bileşenlerin birbiriyle etkileşimini test etmek için entegrasyon testlerinin nasıl oluşturulacağını açıklayacağız.
🔗Entegrasyon Testleri
Rust’ta entegrasyon testleri için gelenek, onları proje kök dizinindeki bir tests dizinine (yani src dizininin yanına) koymaktır. Hem varsayılan test çerçevesi hem de özel test çerçeveleri, bu dizindeki tüm testleri otomatik olarak bulup çalıştırır.
Tüm entegrasyon testleri kendi çalıştırılabilir dosyalarıdır ve main.rs’imizden tamamen ayrıdır. Bu, her testin kendi giriş noktası fonksiyonunu tanımlaması gerektiği anlamına gelir. Ayrıntılı olarak nasıl çalıştığını görmek için basic_boot adında örnek bir entegrasyon testi oluşturalım:
// tests/basic_boot.rs içinde
#![no_std]
#![no_main]
#![feature(custom_test_frameworks)]
#![test_runner(crate::test_runner)]
#![reexport_test_harness_main = "test_main"]
use core::panic::PanicInfo;
#[unsafe(no_mangle)] // bu fonksiyonun adını parçalama (mangle etme)
pub extern "C" fn _start() -> ! {
test_main();
loop {}
}
fn test_runner(tests: &[&dyn Fn()]) {
unimplemented!();
}
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
loop {}
}Entegrasyon testleri ayrı çalıştırılabilir dosyalar olduğundan, tüm crate özniteliklerini (no_std, no_main, test_runner vb.) yeniden sağlamamız gerekir. Ayrıca, test giriş noktası fonksiyonu test_main’i çağıran yeni bir giriş noktası fonksiyonu _start oluşturmamız gerekir. Entegrasyon testi çalıştırılabilir dosyaları asla test dışı modda derlenmediği için herhangi bir cfg(test) özniteliğine ihtiyacımız yok.
test_runner fonksiyonu için bir yer tutucu olarak her zaman panic yapan unimplemented makrosunu kullanıyor ve şimdilik panic handler’ında yalnızca loop yapıyoruz. İdeal olarak, bu fonksiyonları tam olarak main.rs’imizde yaptığımız gibi serial_println makrosunu ve exit_qemu fonksiyonunu kullanarak uygulamak istiyoruz. Sorun, testler main.rs çalıştırılabilir dosyamızdan tamamen ayrı olarak derlendiği için bu fonksiyonlara erişimimizin olmamasıdır.
Bu aşamada cargo test çalıştırırsanız, panic handler’ı sonsuza dek döngüye girdiği için sonsuz bir döngüyle karşılaşırsınız. QEMU’dan çıkmak için ctrl+c klavye kısayolunu kullanmanız gerekir.
🔗Bir Kütüphane Oluşturmak
Gereken fonksiyonları entegrasyon testimize kullanılabilir kılmak için, main.rs’imizden, diğer crate’ler ve entegrasyon testi çalıştırılabilir dosyaları tarafından dahil edilebilecek bir kütüphaneyi ayırmamız gerekir. Bunu yapmak için yeni bir src/lib.rs dosyası oluşturuyoruz:
// src/lib.rs
#![no_std]
main.rs gibi, lib.rs de cargo tarafından otomatik olarak tanınan özel bir dosyadır. Kütüphane ayrı bir derleme birimidir, bu yüzden #![no_std] özniteliğini yeniden belirtmemiz gerekir.
Kütüphanemizi cargo test ile çalışır hale getirmek için, test fonksiyonlarını ve özniteliklerini de main.rs’ten lib.rs’e taşımamız gerekir:
// src/lib.rs içinde
#![cfg_attr(test, no_main)]
#![feature(custom_test_frameworks)]
#![test_runner(crate::test_runner)]
#![reexport_test_harness_main = "test_main"]
use core::panic::PanicInfo;
pub trait Testable {
fn run(&self) -> ();
}
impl<T> Testable for T
where
T: Fn(),
{
fn run(&self) {
serial_print!("{}...\t", core::any::type_name::<T>());
self();
serial_println!("[ok]");
}
}
pub fn test_runner(tests: &[&dyn Testable]) {
serial_println!("Running {} tests", tests.len());
for test in tests {
test.run();
}
exit_qemu(QemuExitCode::Success);
}
pub fn test_panic_handler(info: &PanicInfo) -> ! {
serial_println!("[failed]\n");
serial_println!("Error: {}\n", info);
exit_qemu(QemuExitCode::Failed);
loop {}
}
/// `cargo test` için giriş noktası
#[cfg(test)]
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
test_main();
loop {}
}
#[cfg(test)]
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
test_panic_handler(info)
}test_runner’ımızı çalıştırılabilir dosyalara ve entegrasyon testlerine kullanılabilir kılmak için, onu public yapıyor ve ona cfg(test) özniteliğini uygulamıyoruz. Ayrıca panic handler’ımızın uygulamasını public bir test_panic_handler fonksiyonuna ayırıyoruz; böylece o da çalıştırılabilir dosyalar için kullanılabilir oluyor.
lib.rs’imiz main.rs’imizden bağımsız olarak test edildiğinden, kütüphane test modunda derlendiğinde bir _start giriş noktası ve bir panic handler eklememiz gerekir. cfg_attr crate özniteliğini kullanarak, bu durumda no_main özniteliğini koşullu olarak etkinleştiriyoruz.
QemuExitCode enum’ını ve exit_qemu fonksiyonunu da taşıyıp public yapıyoruz:
// src/lib.rs içinde
#[derive(Debug, Clone, Copy, PartialEq, Eq)]
#[repr(u32)]
pub enum QemuExitCode {
Success = 0x10,
Failed = 0x11,
}
pub fn exit_qemu(exit_code: QemuExitCode) {
use x86_64::instructions::port::Port;
unsafe {
let mut port = Port::new(0xf4);
port.write(exit_code as u32);
}
}Artık çalıştırılabilir dosyalar ve entegrasyon testleri bu fonksiyonları kütüphaneden içe aktarabilir ve kendi uygulamalarını tanımlamaları gerekmez. println ve serial_println’i de kullanılabilir kılmak için, modül bildirimlerini de taşıyoruz:
// src/lib.rs içinde
pub mod serial;
pub mod vga_buffer;Modülleri, kütüphanemizin dışında kullanılabilir kılmak için public yapıyoruz. Bu, println ve serial_println makrolarımızı kullanılabilir kılmak için de gereklidir, çünkü onlar modüllerin _print fonksiyonlarını kullanır.
Artık main.rs’imizi kütüphaneyi kullanacak şekilde güncelleyebiliriz:
// src/main.rs içinde
#![no_std]
#![no_main]
#![feature(custom_test_frameworks)]
#![test_runner(blog_os::test_runner)]
#![reexport_test_harness_main = "test_main"]
use core::panic::PanicInfo;
use blog_os::println;
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
println!("Hello World{}", "!");
#[cfg(test)]
test_main();
loop {}
}
/// Bu fonksiyon panic anında çağrılır.
#[cfg(not(test))]
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
println!("{}", info);
loop {}
}
#[cfg(test)]
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
blog_os::test_panic_handler(info)
}Kütüphane, normal bir dış crate gibi kullanılabilir. Tıpkı crate’imiz gibi, adı blog_os’tur. Yukarıdaki kod, test_runner özniteliğinde blog_os::test_runner fonksiyonunu ve cfg(test) panic handler’ımızda blog_os::test_panic_handler fonksiyonunu kullanır. Ayrıca, _start ve panic fonksiyonlarımıza kullanılabilir kılmak için println makrosunu içe aktarır.
Bu noktada cargo run ve cargo test yeniden çalışmalı. Tabii ki cargo test hâlâ sonsuza dek döngüye giriyor (ctrl+c ile çıkabilirsiniz). Bunu, gereken kütüphane fonksiyonlarını entegrasyon testimizde kullanarak düzeltelim.
🔗Entegrasyon Testini Tamamlamak
src/main.rs’imiz gibi, tests/basic_boot.rs çalıştırılabilir dosyamız da yeni kütüphanemizden tipleri içe aktarabilir. Bu, testimizi tamamlamak için eksik bileşenleri içe aktarmamıza olanak tanır:
// tests/basic_boot.rs içinde
#![test_runner(blog_os::test_runner)]
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
blog_os::test_panic_handler(info)
}Test runner’ı yeniden uygulamak yerine, #![test_runner(crate::test_runner)] özniteliğini #![test_runner(blog_os::test_runner)] olarak değiştirerek kütüphanemizdeki test_runner fonksiyonunu kullanıyoruz. Böylece basic_boot.rs’teki test_runner taslak (stub) fonksiyonuna artık ihtiyacımız kalmaz, onu kaldırabiliriz. panic handler’ımız için ise, tıpkı main.rs’imizde yaptığımız gibi blog_os::test_panic_handler fonksiyonunu çağırıyoruz.
Artık cargo test yeniden normal bir şekilde çıkıyor. Onu çalıştırdığınızda, lib.rs, main.rs ve basic_boot.rs için testleri art arda ayrı ayrı derleyip çalıştırdığını görürsünüz. main.rs ve basic_boot entegrasyon testleri için, bu dosyalarda #[test_case] ile işaretlenmiş hiçbir fonksiyon olmadığı için “Running 0 tests” raporlar.
Artık basic_boot.rs’imize testler ekleyebiliriz. Örneğin, VGA arabellek testlerinde yaptığımız gibi, println’in panic yapmadan çalıştığını test edebiliriz:
// tests/basic_boot.rs içinde
use blog_os::println;
#[test_case]
fn test_println() {
println!("test_println output");
}Şimdi cargo test çalıştırdığımızda, test fonksiyonunu bulup çalıştırdığını görüyoruz.
Test şu anda biraz işe yaramaz görünebilir, çünkü VGA arabellek testlerinden biriyle neredeyse aynı. Ancak gelecekte, main.rs ve lib.rs’imizin _start fonksiyonları büyüyebilir ve test_main fonksiyonunu çalıştırmadan önce çeşitli başlatma rutinlerini çağırabilir; böylece iki test çok farklı ortamlarda çalıştırılır.
println’i, _start’ta herhangi bir başlatma rutini çağırmadan bir basic_boot ortamında test ederek, println’in önyüklemeden hemen sonra çalıştığından emin olabiliriz. Bu önemlidir, çünkü ona örneğin panic mesajlarını yazdırmak için güveniyoruz.
🔗Gelecekteki Testler
Entegrasyon testlerinin gücü, tamamen ayrı çalıştırılabilir dosyalar olarak ele alınmalarıdır. Bu onlara ortam üzerinde tam kontrol verir; bu da kodun CPU veya donanım cihazlarıyla doğru şekilde etkileşip etkileşmediğini test etmeyi mümkün kılar.
basic_boot testimiz, bir entegrasyon testinin çok basit bir örneğidir. Gelecekte kernel’imiz çok daha fazla özellik kazanacak ve donanımla çeşitli şekillerde etkileşecek. Entegrasyon testleri ekleyerek, bu etkileşimlerin beklendiği gibi çalıştığından (ve çalışmaya devam ettiğinden) emin olabiliriz. Olası gelecekteki testler için bazı fikirler:
- CPU Exception’ları: Kod geçersiz işlemler gerçekleştirdiğinde (örneğin sıfıra bölme), CPU bir exception fırlatır. Kernel, bu tür exception’lar için handler fonksiyonları kaydedebilir. Bir entegrasyon testi, bir CPU exception’ı oluştuğunda doğru exception handler’ının çağrıldığını veya çözülebilir bir exception’dan sonra çalıştırmanın doğru şekilde devam ettiğini doğrulayabilir.
- Sayfa Tabloları (Page Tables): Sayfa tabloları, hangi bellek bölgelerinin geçerli ve erişilebilir olduğunu tanımlar. Sayfa tablolarını değiştirerek, örneğin programları başlatırken yeni bellek bölgeleri ayırmak mümkündür. Bir entegrasyon testi,
_startfonksiyonunda sayfa tablolarını değiştirebilir ve değişikliklerin#[test_case]fonksiyonlarında istenen etkilere sahip olduğunu doğrulayabilir. - Kullanıcı Alanı (Userspace) Programları: Kullanıcı alanı programları, sistemin kaynaklarına sınırlı erişimi olan programlardır. Örneğin, kernel veri yapılarına veya diğer programların belleğine erişimleri yoktur. Bir entegrasyon testi, yasak işlemler gerçekleştiren kullanıcı alanı programları başlatabilir ve kernel’in hepsini engellediğini doğrulayabilir.
Tahmin edebileceğiniz gibi, çok daha fazla test mümkündür. Bu tür testler ekleyerek, kernel’imize yeni özellikler eklediğimizde veya kodumuzu yeniden düzenlediğimizde (refactor) onları yanlışlıkla bozmadığımızdan emin olabiliriz. Bu, özellikle kernel’imiz daha büyük ve daha karmaşık hale geldiğinde önemlidir.
🔗Panic Etmesi Gereken Testler
Standart kütüphanenin test çerçevesi, başarısız olması gereken testler oluşturmaya olanak tanıyan bir #[should_panic] özniteliğini destekler. Bu, örneğin geçersiz bir argüman geçirildiğinde bir fonksiyonun başarısız olduğunu doğrulamak için yararlıdır. Ne yazık ki bu öznitelik, standart kütüphaneden destek gerektirdiği için #[no_std] crate’lerinde desteklenmez.
#[should_panic] özniteliğini kernel’imizde kullanamasak da, panic handler’dan başarı hata koduyla çıkan bir entegrasyon testi oluşturarak benzer bir davranış elde edebiliriz. should_panic adıyla böyle bir test oluşturmaya başlayalım:
// tests/should_panic.rs içinde
#![no_std]
#![no_main]
use core::panic::PanicInfo;
use blog_os::{QemuExitCode, exit_qemu, serial_println};
#[panic_handler]
fn panic(_info: &PanicInfo) -> ! {
serial_println!("[ok]");
exit_qemu(QemuExitCode::Success);
loop {}
}Bu test, henüz bir _start fonksiyonu veya özel test runner özniteliklerinden herhangi birini tanımlamadığı için hâlâ eksiktir. Eksik kısımları ekleyelim:
// tests/should_panic.rs içinde
#![feature(custom_test_frameworks)]
#![test_runner(test_runner)]
#![reexport_test_harness_main = "test_main"]
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
test_main();
loop {}
}
pub fn test_runner(tests: &[&dyn Fn()]) {
serial_println!("Running {} tests", tests.len());
for test in tests {
test();
serial_println!("[test did not panic]");
exit_qemu(QemuExitCode::Failed);
}
exit_qemu(QemuExitCode::Success);
}lib.rs’imizdeki test_runner’ı yeniden kullanmak yerine, test kendi test_runner fonksiyonunu tanımlar; bu fonksiyon, bir test panic yapmadan geri döndüğünde bir başarısızlık çıkış koduyla çıkar (testlerimizin panic yapmasını istiyoruz). Hiçbir test fonksiyonu tanımlanmamışsa, runner bir başarı hata koduyla çıkar. Runner her zaman tek bir testi çalıştırdıktan sonra çıktığı için, birden fazla #[test_case] fonksiyonu tanımlamak mantıklı değildir.
Artık başarısız olması gereken bir test oluşturabiliriz:
// tests/should_panic.rs içinde
use blog_os::serial_print;
#[test_case]
fn should_fail() {
serial_print!("should_panic::should_fail...\t");
assert_eq!(0, 1);
}Test, 0 ile 1’in eşit olduğunu doğrulamak için assert_eq kullanır. Tabii ki bu başarısız olur, bu yüzden testimiz istendiği gibi panic yapar. Burada Testable trait’ini kullanmadığımız için fonksiyon adını serial_print! kullanarak elle yazdırmamız gerektiğine dikkat edin.
Testi cargo test --test should_panic aracılığıyla çalıştırdığımızda, beklendiği gibi panic yaptığı için başarılı olduğunu görüyoruz. Assertion’ı yorum satırı haline getirip testi tekrar çalıştırdığımızda, gerçekten “test did not panic” mesajıyla başarısız olduğunu görüyoruz.
Bu yaklaşımın önemli bir dezavantajı, yalnızca tek bir test fonksiyonu için çalışmasıdır. Birden çok #[test_case] fonksiyonu olduğunda, panic handler çağrıldıktan sonra çalıştırma devam edemediği için yalnızca ilk fonksiyon çalıştırılır. Şu anda bu sorunu çözmenin iyi bir yolunu bilmiyorum, bu yüzden bir fikriniz varsa bana bildirin!
🔗Harness’sız Testler
Yalnızca tek bir test fonksiyonu olan entegrasyon testleri için (should_panic testimiz gibi), test runner’a gerçekten gerek yoktur. Bunun gibi durumlarda, test runner’ı tamamen devre dışı bırakabilir ve testimizi doğrudan _start fonksiyonunda çalıştırabiliriz.
Bunun anahtarı, testin Cargo.toml’daki harness bayrağını devre dışı bırakmaktır; bu bayrak, bir entegrasyon testi için bir test runner kullanılıp kullanılmayacağını tanımlar. false olarak ayarlandığında, hem varsayılan test runner hem de özel test runner özelliği devre dışı bırakılır; böylece test normal bir çalıştırılabilir dosya gibi ele alınır.
should_panic testimiz için harness bayrağını devre dışı bırakalım:
# Cargo.toml içinde
[[test]]
name = "should_panic"
harness = falseŞimdi should_panic testimizi, test_runner ile ilgili kodu kaldırarak büyük ölçüde basitleştiriyoruz. Sonuç şöyle görünür:
// tests/should_panic.rs içinde
#![no_std]
#![no_main]
use core::panic::PanicInfo;
use blog_os::{exit_qemu, serial_print, serial_println, QemuExitCode};
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
should_fail();
serial_println!("[test did not panic]");
exit_qemu(QemuExitCode::Failed);
loop{}
}
fn should_fail() {
serial_print!("should_panic::should_fail...\t");
assert_eq!(0, 1);
}
#[panic_handler]
fn panic(_info: &PanicInfo) -> ! {
serial_println!("[ok]");
exit_qemu(QemuExitCode::Success);
loop {}
}Artık should_fail fonksiyonunu doğrudan _start fonksiyonumuzdan çağırıyor ve geri dönerse bir başarısızlık çıkış koduyla çıkıyoruz. Şimdi cargo test --test should_panic çalıştırdığımızda, testin tam olarak öncekiyle aynı davrandığını görüyoruz.
should_panic testleri oluşturmanın yanı sıra, harness özniteliğini devre dışı bırakmak karmaşık entegrasyon testleri için de yararlı olabilir; örneğin tek tek test fonksiyonlarının yan etkileri olduğunda ve belirli bir sırada çalıştırılmaları gerektiğinde.
🔗Özet
Test etme, belirli bileşenlerin istenen davranışa sahip olduğundan emin olmak için çok yararlı bir tekniktir. Hataların yokluğunu gösteremeseler bile, onları bulmak ve özellikle gerilemeleri (regression) önlemek için yine de yararlı bir araçtır.
Bu yazı, Rust kernel’imiz için bir test çerçevesinin nasıl kurulacağını açıkladı. Bare metal ortamımızda basit bir #[test_case] özniteliğine yönelik destek uygulamak için Rust’ın özel test çerçeveleri özelliğini kullandık. QEMU’nun isa-debug-exit cihazını kullanarak, test runner’ımız testleri çalıştırdıktan sonra QEMU’dan çıkabilir ve test durumunu raporlayabilir. Hata mesajlarını VGA arabelleği yerine konsola yazdırmak için, seri port için temel bir sürücü oluşturduk.
println makromuz için bazı testler oluşturduktan sonra, yazının ikinci yarısında entegrasyon testlerini inceledik. Onların tests dizininde bulunduğunu ve tamamen ayrı çalıştırılabilir dosyalar olarak ele alındığını öğrendik. Onlara exit_qemu fonksiyonuna ve serial_println makrosuna erişim vermek için, kodumuzun çoğunu tüm çalıştırılabilir dosyalar ve entegrasyon testleri tarafından içe aktarılabilen bir kütüphaneye taşıdık. Entegrasyon testleri kendi ayrı ortamlarında çalıştığı için, donanımla etkileşimleri test etmeyi veya panic etmesi gereken testler oluşturmayı mümkün kılarlar.
Artık QEMU’nun içinde gerçekçi bir ortamda çalışan bir test çerçevemiz var. Gelecekteki yazılarda daha fazla test oluşturarak, kernel’imiz daha karmaşık hale geldiğinde onu sürdürülebilir tutabiliriz.
🔗Sırada ne var?
Bir sonraki yazıda CPU exception’larını inceleyeceğiz. Bu exception’lar, sıfıra bölme veya eşlenmemiş bir bellek sayfasına erişim (sözde bir “page fault”) gibi yasa dışı bir şey olduğunda CPU tarafından fırlatılır. Bu exception’ları yakalayabilmek ve inceleyebilmek, gelecekteki hataların ayıklanması için çok önemlidir. Exception işleme, klavye desteği için gereken donanım interrupt’larının işlenmesine de çok benzer.
Yorumlar
Bir sorunuz mu var, geri bildirim paylaşmak veya fikirlerinizi tartışmak mı istiyorsunuz? Buraya yorum bırakmaktan çekinmeyin! Lütfen İngilizce kullanın ve Rust'ın davranış kurallarına uyun. Bu yorum dizisi doğrudan GitHub'daki bir tartışmaya bağlıdır, dolayısıyla isterseniz oraya da yorum yapabilirsiniz.
Instead of authenticating the giscus application, you can also comment directly on GitHub.
Mümkünse yorumlarınızı İngilizce bırakınız.