Donanım Interrupt'ları
Çevrilmiş İçerik: Bu, Hardware Interrupts adlı gönderinin topluluk tarafından yapılmış bir çevirisidir. Eksik, güncel olmayan veya hata içeriyor olabilir. Lütfen herhangi bir sorunu bildirin!
Translation by @rhotav.
Bu yazıda, donanım interrupt’larını CPU’ya doğru şekilde iletmek için programlanabilir interrupt controller’ı kuruyoruz. Bu interrupt’ları işlemek için, tıpkı exception handler’larımız için yaptığımız gibi, interrupt descriptor table’ımıza yeni girdiler ekliyoruz. Periyodik timer interrupt’larını nasıl alacağımızı ve klavyeden nasıl girdi alacağımızı öğreneceğiz.
Bu blog GitHub üzerinde açık biçimde geliştirilmektedir. Herhangi bir sorun veya sorunuz varsa lütfen orada bir issue açın. Ayrıca sayfanın en altına yorum bırakabilirsiniz. Bu yazının eksiksiz kaynak kodu post-07 dalında bulunabilir.
İçindekiler
🔗Genel Bakış
Interrupt’lar, bağlı donanım cihazlarından CPU’yu bilgilendirmenin bir yolunu sağlar. Yani, kernel’in klavyeyi yeni karakterler için periyodik olarak kontrol etmesine (yoklama (polling) adı verilen bir süreç) izin vermek yerine, klavye her tuş basışını kernel’e bildirebilir. Bu çok daha verimlidir, çünkü kernel’in yalnızca bir şey olduğunda harekete geçmesi gerekir. Ayrıca, kernel yalnızca bir sonraki yoklamada değil, hemen tepki verebileceği için daha hızlı tepki sürelerine de olanak tanır.
Tüm donanım cihazlarını doğrudan CPU’ya bağlamak mümkün değildir. Bunun yerine, ayrı bir interrupt controller tüm cihazlardan gelen interrupt’ları toplar ve ardından CPU’yu bilgilendirir:
____________ _____
Timer ------------> | | | |
Keyboard ---------> | Interrupt |---------> | CPU |
Other Hardware ---> | Controller | |_____|
Etc. -------------> |____________|
Çoğu interrupt controller programlanabilirdir; bu da interrupt’lar için farklı öncelik seviyelerini destekledikleri anlamına gelir. Örneğin bu, doğru zaman tutmayı sağlamak için timer interrupt’larına klavye interrupt’larından daha yüksek bir öncelik vermeye olanak tanır.
Exception’ların aksine, donanım interrupt’ları asenkron olarak meydana gelir. Bu, çalıştırılan koddan tamamen bağımsız oldukları ve herhangi bir zamanda meydana gelebilecekleri anlamına gelir. Böylece, kernel’imizde aniden tüm potansiyel eşzamanlılıkla (concurrency) ilgili hatalarıyla birlikte bir tür eşzamanlılık ortaya çıkar. Rust’ın katı sahiplik modeli burada bize yardımcı olur, çünkü değiştirilebilir global durumu yasaklar. Ancak deadlock’lar hâlâ mümkündür; bu yazının ilerleyen kısımlarında göreceğimiz gibi.
🔗8259 PIC
Intel 8259, 1976’da tanıtılan programlanabilir bir interrupt controller’dır (PIC). Uzun süre önce yerini daha yeni APIC almıştır, ancak arayüzü geriye dönük uyumluluk nedenleriyle güncel sistemlerde hâlâ desteklenir. 8259 PIC’in kurulumu APIC’ten önemli ölçüde daha kolaydır, bu yüzden daha sonraki bir yazıda APIC’e geçmeden önce interrupt’larla tanışmak için onu kullanacağız.
8259’un sekiz interrupt hattı ve CPU ile iletişim kurmak için çeşitli hatları vardır. O zamanların tipik sistemleri, 8259 PIC’in iki örneğiyle donatılmıştı; biri birincil (primary), biri ikincil (secondary) PIC olmak üzere, ikincisi birincilin interrupt hatlarından birine bağlıydı:
____________ ____________
Real Time Clock --> | | Timer -------------> | |
ACPI -------------> | | Keyboard-----------> | | _____
Available --------> | Secondary |----------------------> | Primary | | |
Available --------> | Interrupt | Serial Port 2 -----> | Interrupt |---> | CPU |
Mouse ------------> | Controller | Serial Port 1 -----> | Controller | |_____|
Co-Processor -----> | | Parallel Port 2/3 -> | |
Primary ATA ------> | | Floppy disk -------> | |
Secondary ATA ----> |____________| Parallel Port 1----> |____________|
Bu grafik, interrupt hatlarının tipik atamasını gösterir. 15 hattın çoğunun sabit bir eşlemesi olduğunu görüyoruz; örneğin, ikincil PIC’in 4. hattı fareye atanmıştır.
Her controller iki I/O portu aracılığıyla yapılandırılabilir: bir “komut” portu ve bir “veri” portu. Birincil controller için bu portlar 0x20 (komut) ve 0x21’dir (veri). İkincil controller için ise 0xa0 (komut) ve 0xa1’dir (veri). PIC’lerin nasıl yapılandırılabileceği hakkında daha fazla bilgi için osdev.org’daki makaleye bakın.
🔗Uygulama
PIC’lerin varsayılan yapılandırması kullanılabilir değildir, çünkü CPU’ya 0–15 aralığında interrupt vektör numaraları gönderir. Bu numaralar zaten CPU exception’ları tarafından işgal edilmiştir. Örneğin, 8 numarası bir double fault’a karşılık gelir. Bu çakışma sorununu düzeltmek için, PIC interrupt’larını farklı numaralara yeniden eşlememiz (remap) gerekir. Exception’larla çakışmadığı sürece gerçek aralık önemli değildir, ancak tipik olarak 32–47 aralığı seçilir; çünkü bunlar 32 exception yuvasından sonraki ilk boş numaralardır.
Yapılandırma, PIC’lerin komut ve veri portlarına özel değerler yazılarak gerçekleşir. Neyse ki, pic8259 adında zaten bir crate var, bu yüzden başlatma dizisini kendimiz yazmamıza gerek yok. Ancak nasıl çalıştığıyla ilgileniyorsanız, kaynak koduna göz atın. Oldukça küçük ve iyi belgelenmiştir.
Crate’i bir bağımlılık olarak eklemek için, projemize aşağıdakini ekliyoruz:
# Cargo.toml içinde
[dependencies]
pic8259 = "0.11.0"Crate’in sağladığı ana soyutlama, yukarıda gördüğümüz birincil/ikincil PIC düzenini temsil eden ChainedPics struct’ıdır. Aşağıdaki şekilde kullanılmak üzere tasarlanmıştır:
// src/interrupts.rs içinde
use pic8259::ChainedPics;
use spin;
pub const PIC_1_OFFSET: u8 = 32;
pub const PIC_2_OFFSET: u8 = PIC_1_OFFSET + 8;
pub static PICS: spin::Mutex<ChainedPics> =
spin::Mutex::new(unsafe { ChainedPics::new(PIC_1_OFFSET, PIC_2_OFFSET) });Yukarıda belirtildiği gibi, PIC’lerin ofsetlerini 32–47 aralığına ayarlıyoruz. ChainedPics struct’ını bir Mutex içine sararak, bir sonraki adımda ihtiyaç duyacağımız güvenli değiştirilebilir erişimi (lock metodu aracılığıyla) elde edebiliriz. ChainedPics::new fonksiyonu unsafe’tir, çünkü yanlış ofsetler tanımsız davranışa neden olabilir.
Artık 8259 PIC’i init fonksiyonumuzda başlatabiliriz:
// src/lib.rs içinde
pub fn init() {
gdt::init();
interrupts::init_idt();
unsafe { interrupts::PICS.lock().initialize() }; // yeni
}PIC başlatmasını gerçekleştirmek için initialize fonksiyonunu kullanıyoruz. ChainedPics::new fonksiyonu gibi, bu fonksiyon da unsafe’tir; çünkü PIC yanlış yapılandırılırsa tanımsız davranışa neden olabilir.
Her şey yolunda giderse, cargo run çalıştırdığımızda “It did not crash” mesajını görmeye devam etmeliyiz.
🔗Interrupt’ları Etkinleştirmek
Şimdiye kadar hiçbir şey olmadı, çünkü interrupt’lar CPU yapılandırmasında hâlâ devre dışı. Bu, CPU’nun interrupt controller’ı hiç dinlemediği anlamına gelir, bu yüzden hiçbir interrupt CPU’ya ulaşamaz. Bunu değiştirelim:
// src/lib.rs içinde
pub fn init() {
gdt::init();
interrupts::init_idt();
unsafe { interrupts::PICS.lock().initialize() };
x86_64::instructions::interrupts::enable(); // yeni
}x86_64 crate’inin interrupts::enable fonksiyonu, harici interrupt’ları etkinleştirmek için özel sti komutunu (“set interrupts”) çalıştırır. Şimdi cargo run denediğimizde, bir double fault’un meydana geldiğini görüyoruz:
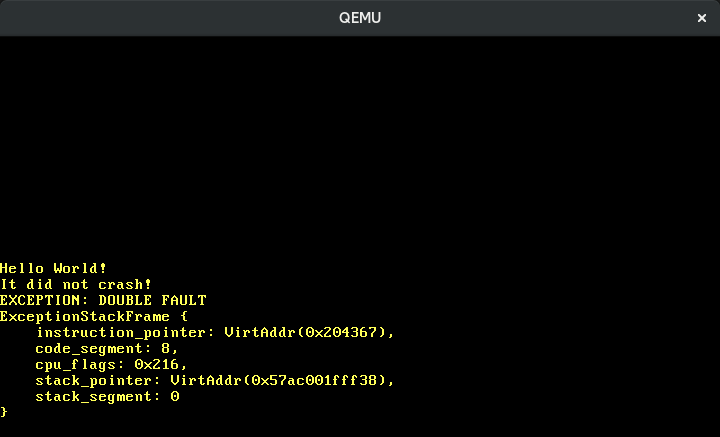
Bu double fault’un nedeni, donanım timer’ının (tam olarak Intel 8253) varsayılan olarak etkin olmasıdır; bu yüzden interrupt’ları etkinleştirir etkinleştirmez timer interrupt’ları almaya başlarız. Onun için henüz bir handler fonksiyonu tanımlamadığımız için, double fault handler’ımız çağrılır.
🔗Timer Interrupt’larını İşlemek
Yukarıdaki grafikten gördüğümüz gibi, timer birincil PIC’in 0. hattını kullanır. Bu, CPU’ya interrupt 32 (0 + ofset 32) olarak ulaştığı anlamına gelir. İndeks 32’yi koda gömmek (hardcode) yerine, onu bir InterruptIndex enum’ında saklıyoruz:
// src/interrupts.rs içinde
#[derive(Debug, Clone, Copy)]
#[repr(u8)]
pub enum InterruptIndex {
Timer = PIC_1_OFFSET,
}
impl InterruptIndex {
fn as_u8(self) -> u8 {
self as u8
}
}Enum, her varyant için indeksi doğrudan belirtebilmemiz için bir C benzeri enum’dır. repr(u8) özniteliği, her varyantın bir u8 olarak temsil edildiğini belirtir. Gelecekte diğer interrupt’lar için daha fazla varyant ekleyeceğiz.
Artık timer interrupt’ı için bir handler fonksiyonu ekleyebiliriz:
// src/interrupts.rs içinde
use crate::print;
lazy_static! {
static ref IDT: InterruptDescriptorTable = {
let mut idt = InterruptDescriptorTable::new();
idt.breakpoint.set_handler_fn(breakpoint_handler);
[…]
idt[InterruptIndex::Timer.as_u8()]
.set_handler_fn(timer_interrupt_handler); // yeni
idt
};
}
extern "x86-interrupt" fn timer_interrupt_handler(
_stack_frame: InterruptStackFrame)
{
print!(".");
}timer_interrupt_handler’ımız, exception handler’larımızla aynı imzaya sahiptir; çünkü CPU exception’lara ve harici interrupt’lara aynı şekilde tepki verir (tek fark, bazı exception’ların bir hata kodu push’lamasıdır). InterruptDescriptorTable struct’ı IndexMut trait’ini uygular, bu yüzden tek tek girdilere dizi indeksleme söz dizimi aracılığıyla erişebiliriz.
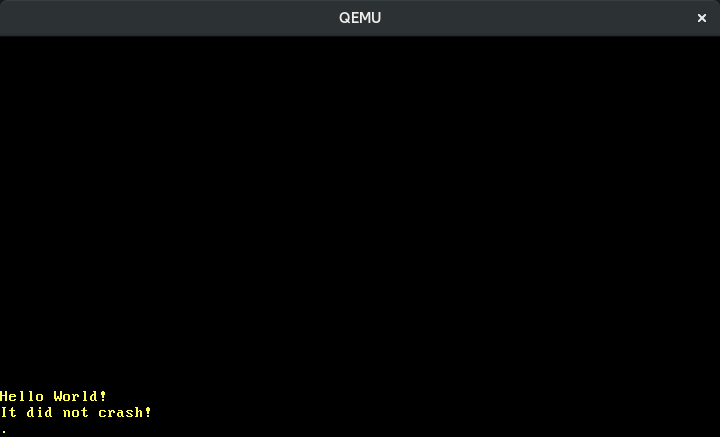
Timer interrupt handler’ımızda, ekrana bir nokta yazdırıyoruz. Timer interrupt’ı periyodik olarak gerçekleştiği için, her timer tıkında bir nokta belirmesini bekleriz. Ancak onu çalıştırdığımızda, yalnızca tek bir noktanın yazdırıldığını görüyoruz:
🔗Interrupt Sonu (End of Interrupt)
Bunun nedeni, PIC’in interrupt handler’ımızdan açık bir “interrupt sonu” (end of interrupt, EOI) sinyali beklemesidir. Bu sinyal controller’a, interrupt’ın işlendiğini ve sistemin bir sonraki interrupt’ı almaya hazır olduğunu söyler. Yani PIC, hâlâ ilk timer interrupt’ını işlemekle meşgul olduğumuzu düşünür ve bir sonrakini göndermeden önce sabırla EOI sinyalini bekler.
EOI’yi göndermek için yine statik PICS struct’ımızı kullanıyoruz:
// src/interrupts.rs içinde
extern "x86-interrupt" fn timer_interrupt_handler(
_stack_frame: InterruptStackFrame)
{
print!(".");
unsafe {
PICS.lock()
.notify_end_of_interrupt(InterruptIndex::Timer.as_u8());
}
}notify_end_of_interrupt, interrupt’ı birincil mi yoksa ikincil PIC’in mi gönderdiğini bulur ve ardından ilgili controller’lara bir EOI sinyali göndermek için command ve data portlarını kullanır. İnterrupt’ı ikincil PIC gönderdiyse, ikincil PIC birincil PIC’in bir giriş hattına bağlı olduğu için her iki PIC’in de bilgilendirilmesi gerekir.
Doğru interrupt vektör numarasını kullanmaya dikkat etmeliyiz; aksi takdirde yanlışlıkla önemli, gönderilmemiş bir interrupt’ı silebilir veya sistemimizin asılı kalmasına neden olabiliriz. Fonksiyonun unsafe olmasının nedeni budur.
Şimdi cargo run çalıştırdığımızda, ekranda periyodik olarak beliren noktalar görüyoruz:
🔗Timer’ı Yapılandırmak
Kullandığımız donanım timer’ının adı kısaca Programmable Interval Timer ya da PIT’tir. Adının da söylediği gibi, iki interrupt arasındaki aralığı yapılandırmak mümkündür. Yakında APIC timer’a geçeceğimiz için burada ayrıntılara girmeyeceğiz, ancak OSDev wiki’sinde PIT’i yapılandırma hakkında kapsamlı bir makale var.
🔗Deadlock’lar
Artık kernel’imizde bir tür eşzamanlılığımız var: Timer interrupt’ları asenkron olarak meydana gelir, bu yüzden _start fonksiyonumuzu herhangi bir zamanda kesebilirler. Neyse ki, Rust’ın sahiplik sistemi eşzamanlılıkla ilgili pek çok tür hatayı derleme zamanında önler. Dikkate değer bir istisna deadlock’lardır. Deadlock’lar, bir thread asla serbest kalmayacak bir kilidi (lock) almaya çalıştığında meydana gelir. Böylece thread süresiz olarak asılı kalır.
Kernel’imizde halihazırda bir deadlock’a yol açabiliriz. Hatırlayın, println makromuz vga_buffer::_print fonksiyonunu çağırır; bu fonksiyon, bir spinlock kullanarak global bir WRITER’ı kilitler:
// src/vga_buffer.rs içinde
[…]
#[doc(hidden)]
pub fn _print(args: fmt::Arguments) {
use core::fmt::Write;
WRITER.lock().write_fmt(args).unwrap();
}WRITER’ı kilitler, onun üzerinde write_fmt çağırır ve fonksiyonun sonunda örtük olarak kilidini açar. Şimdi, WRITER kilitliyken bir interrupt meydana geldiğini ve interrupt handler’ının da bir şeyler yazdırmaya çalıştığını hayal edin:
| Zaman adımı | _start | interrupt_handler |
|---|---|---|
| 0 | println! çağırır | |
| 1 | print, WRITER’ı kilitler | |
| 2 | interrupt meydana gelir, handler çalışmaya başlar | |
| 3 | println! çağırır | |
| 4 | print, WRITER’ı kilitlemeye çalışır (zaten kilitli) | |
| 5 | print, WRITER’ı kilitlemeye çalışır (zaten kilitli) | |
| … | … | |
| asla | WRITER’ın kilidini aç |
WRITER kilitlidir, bu yüzden interrupt handler’ı serbest kalana kadar bekler. Ancak bu asla gerçekleşmez, çünkü _start fonksiyonu yalnızca interrupt handler’ı geri döndükten sonra çalışmaya devam eder. Böylece tüm sistem asılı kalır.
🔗Bir Deadlock’a Yol Açmak
_start fonksiyonumuzun sonundaki döngüde bir şeyler yazdırarak kernel’imizde kolayca böyle bir deadlock’a yol açabiliriz:
// src/main.rs içinde
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
[…]
loop {
use blog_os::print;
print!("-"); // yeni
}
}Onu QEMU’da çalıştırdığımızda, şu biçimde bir çıktı alıyoruz:
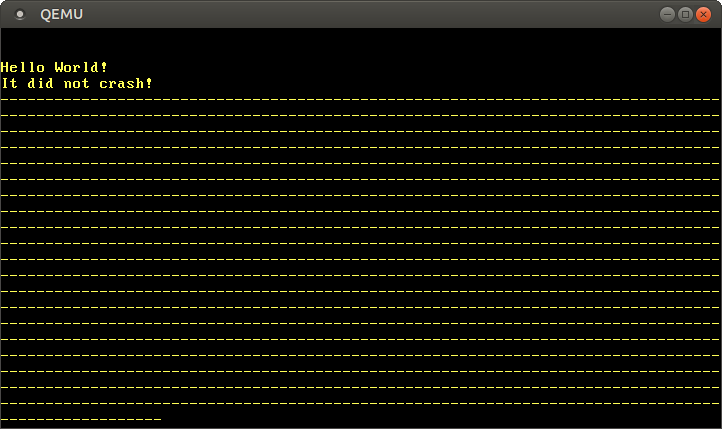
İlk timer interrupt’ı meydana gelene kadar yalnızca sınırlı sayıda tirenin yazdırıldığını görüyoruz. Sonra sistem asılı kalır, çünkü timer interrupt handler’ı bir nokta yazdırmaya çalıştığında deadlock’a girer. Yukarıdaki çıktıda hiç nokta görmememizin nedeni budur.
Tirelerin gerçek sayısı çalıştırmalar arasında değişir, çünkü timer interrupt’ı asenkron olarak meydana gelir. Bu belirsizlik (non-determinism), eşzamanlılıkla ilgili hataların hata ayıklamasını bu kadar zorlaştıran şeydir.
🔗Deadlock’u Düzeltmek
Bu deadlock’tan kaçınmak için, Mutex kilitli olduğu sürece interrupt’ları devre dışı bırakabiliriz:
// src/vga_buffer.rs içinde
/// Verilen biçimlendirilmiş dizeyi, global `WRITER` örneği aracılığıyla
/// VGA metin arabelleğine yazdırır.
#[doc(hidden)]
pub fn _print(args: fmt::Arguments) {
use core::fmt::Write;
use x86_64::instructions::interrupts; // yeni
interrupts::without_interrupts(|| { // yeni
WRITER.lock().write_fmt(args).unwrap();
});
}without_interrupts fonksiyonu bir closure alır ve onu interrupt’sız bir ortamda çalıştırır. Onu, Mutex kilitli olduğu sürece hiçbir interrupt’ın meydana gelememesini sağlamak için kullanıyoruz. Kernel’imizi şimdi çalıştırdığımızda, asılı kalmadan çalışmaya devam ettiğini görüyoruz. (Hâlâ herhangi bir nokta fark etmiyoruz, ancak bunun nedeni çok hızlı kaymalarıdır. Yazdırmayı yavaşlatmayı deneyin; örneğin döngünün içine bir for _ in 0..10000 {} koyarak.)
Aynı değişikliği, onunla da deadlock’ların oluşmamasını sağlamak için seri yazdırma fonksiyonumuza da uygulayabiliriz:
// src/serial.rs içinde
#[doc(hidden)]
pub fn _print(args: ::core::fmt::Arguments) {
use core::fmt::Write;
use x86_64::instructions::interrupts; // yeni
interrupts::without_interrupts(|| { // yeni
SERIAL1
.lock()
.write_fmt(args)
.expect("Printing to serial failed");
});
}İnterrupt’ları devre dışı bırakmanın genel bir çözüm olmaması gerektiğine dikkat edin. Sorun, en kötü durum interrupt gecikmesini, yani sistemin bir interrupt’a tepki verene kadar geçen süreyi artırmasıdır. Bu nedenle, interrupt’lar yalnızca çok kısa bir süre için devre dışı bırakılmalıdır.
🔗Bir Race Condition’ı Düzeltmek
cargo test çalıştırırsanız, test_println_output testinin başarısız olduğunu görebilirsiniz:
> cargo test --lib
[…]
Running 4 tests
test_breakpoint_exception...[ok]
test_println... [ok]
test_println_many... [ok]
test_println_output... [failed]
Error: panicked at 'assertion failed: `(left == right)`
left: `'.'`,
right: `'S'`', src/vga_buffer.rs:205:9Bunun nedeni, test ile timer handler’ımız arasındaki bir race condition’dır. Hatırlayın, test şöyle görünür:
// src/vga_buffer.rs içinde
#[test_case]
fn test_println_output() {
let s = "Some test string that fits on a single line";
println!("{}", s);
for (i, c) in s.chars().enumerate() {
let screen_char = WRITER.lock().buffer.chars[BUFFER_HEIGHT - 2][i].read();
assert_eq!(char::from(screen_char.ascii_character), c);
}
}Test, VGA arabelleğine bir dize yazdırır ve ardından buffer_chars dizisi üzerinde elle iterasyon yaparak çıktıyı kontrol eder. Race condition, timer interrupt handler’ının println ile ekran karakterlerinin okunması arasında çalışabilmesi nedeniyle meydana gelir. Bunun, Rust’ın derleme zamanında tamamen önlediği tehlikeli bir veri yarışı (data race) olmadığını unutmayın. Ayrıntılar için Rustonomicon’a bakın.
Bunu düzeltmek için, WRITER’ı testin tüm süresi boyunca kilitli tutmamız gerekir; böylece timer handler’ı arada ekrana bir . yazamaz. Düzeltilmiş test şöyle görünür:
// src/vga_buffer.rs içinde
#[test_case]
fn test_println_output() {
use core::fmt::Write;
use x86_64::instructions::interrupts;
let s = "Some test string that fits on a single line";
interrupts::without_interrupts(|| {
let mut writer = WRITER.lock();
writeln!(writer, "\n{}", s).expect("writeln failed");
for (i, c) in s.chars().enumerate() {
let screen_char = writer.buffer.chars[BUFFER_HEIGHT - 2][i].read();
assert_eq!(char::from(screen_char.ascii_character), c);
}
});
}Aşağıdaki değişiklikleri yaptık:
lock()metodunu açıkça kullanarak writer’ı testin tamamı boyunca kilitli tutuyoruz.printlnyerine, zaten kilitli bir writer’a yazdırmaya olanak tanıyanwritelnmakrosunu kullanıyoruz.- Başka bir deadlock’tan kaçınmak için, testin süresi boyunca interrupt’ları devre dışı bırakıyoruz. Aksi takdirde, writer hâlâ kilitliyken test kesintiye uğrayabilir.
- Timer interrupt handler’ı testten önce hâlâ çalışabileceği için,
sdizesini yazdırmadan önce ek bir yeni satır\nyazdırıyoruz. Bu sayede, timer handler’ı mevcut satıra zaten bazı.karakterleri yazdırmışsa test başarısızlığından kaçınırız.
Yukarıdaki değişikliklerle, cargo test artık deterministik olarak yeniden başarılı oluyor.
Bu, yalnızca bir test başarısızlığına neden olan çok zararsız bir race condition’dı. Tahmin edebileceğiniz gibi, diğer race condition’lar belirsiz (non-deterministic) doğaları nedeniyle hata ayıklaması çok daha zor olabilir. Neyse ki Rust, race condition’ların en ciddi sınıfı olan veri yarışlarından bizi korur; çünkü bunlar sistem çökmeleri ve sessiz bellek bozulmaları dahil her türlü tanımsız davranışa neden olabilir.
🔗hlt Komutu
Şimdiye kadar, _start ve panic fonksiyonlarımızın sonunda basit, boş bir döngü ifadesi kullandık. Bu, CPU’nun sonsuza dek dönmesine neden olur ve böylece beklendiği gibi çalışır. Ancak aynı zamanda çok verimsizdir, çünkü yapacak iş olmamasına rağmen CPU tam hızda çalışmaya devam eder. Kernel’inizi çalıştırdığınızda bu sorunu görev yöneticinizde görebilirsiniz: QEMU süreci her zaman %100’e yakın CPU’ya ihtiyaç duyar.
Gerçekten yapmak istediğimiz şey, bir sonraki interrupt gelene kadar CPU’yu durdurmaktır (halt). Bu, CPU’nun çok daha az enerji tükettiği bir uyku durumuna girmesine olanak tanır. hlt komutu tam olarak bunu yapar. Enerji açısından verimli bir sonsuz döngü oluşturmak için bu komutu kullanalım:
// src/lib.rs içinde
pub fn hlt_loop() -> ! {
loop {
x86_64::instructions::hlt();
}
}instructions::hlt fonksiyonu, yalnızca assembly komutunun etrafındaki ince bir sarmalayıcıdır (thin wrapper). Güvenlidir, çünkü bellek güvenliğini tehlikeye atmasının hiçbir yolu yoktur.
Artık bu hlt_loop’u _start ve panic fonksiyonlarımızdaki sonsuz döngüler yerine kullanabiliriz:
// src/main.rs içinde
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
[…]
println!("It did not crash!");
blog_os::hlt_loop(); // yeni
}
#[cfg(not(test))]
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
println!("{}", info);
blog_os::hlt_loop(); // yeni
}
lib.rs’imizi de güncelleyelim:
// src/lib.rs içinde
/// `cargo test` için giriş noktası
#[cfg(test)]
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
init();
test_main();
hlt_loop(); // yeni
}
pub fn test_panic_handler(info: &PanicInfo) -> ! {
serial_println!("[failed]\n");
serial_println!("Error: {}\n", info);
exit_qemu(QemuExitCode::Failed);
hlt_loop(); // yeni
}Kernel’imizi şimdi QEMU’da çalıştırdığımızda, çok daha düşük bir CPU kullanımı görüyoruz.
🔗Klavye Girişi
Artık harici cihazlardan gelen interrupt’ları işleyebildiğimize göre, nihayet klavye girişi için destek ekleyebiliriz. Bu, kernel’imizle ilk kez etkileşim kurmamıza olanak tanıyacak.
Donanım timer’ı gibi, klavye controller’ı da varsayılan olarak zaten etkindir. Yani bir tuşa bastığınızda, klavye controller’ı PIC’e bir interrupt gönderir; o da onu CPU’ya iletir. CPU IDT’de bir handler fonksiyonu arar, ancak karşılık gelen girdi boştur. Bu nedenle bir double fault meydana gelir.
O halde klavye interrupt’ı için bir handler fonksiyonu ekleyelim. Timer interrupt’ı için handler’ı tanımlama şeklimize oldukça benzer; yalnızca farklı bir interrupt numarası kullanır:
// src/interrupts.rs içinde
#[derive(Debug, Clone, Copy)]
#[repr(u8)]
pub enum InterruptIndex {
Timer = PIC_1_OFFSET,
Keyboard, // yeni
}
lazy_static! {
static ref IDT: InterruptDescriptorTable = {
let mut idt = InterruptDescriptorTable::new();
idt.breakpoint.set_handler_fn(breakpoint_handler);
[…]
// yeni
idt[InterruptIndex::Keyboard.as_u8()]
.set_handler_fn(keyboard_interrupt_handler);
idt
};
}
extern "x86-interrupt" fn keyboard_interrupt_handler(
_stack_frame: InterruptStackFrame)
{
print!("k");
unsafe {
PICS.lock()
.notify_end_of_interrupt(InterruptIndex::Keyboard.as_u8());
}
}Yukarıdaki grafikten gördüğümüz gibi, klavye birincil PIC’in 1. hattını kullanır. Bu, CPU’ya interrupt 33 (1 + ofset 32) olarak ulaştığı anlamına gelir. Bu indeksi InterruptIndex enum’ına yeni bir Keyboard varyantı olarak ekliyoruz. Değeri açıkça belirtmemize gerek yok, çünkü varsayılan olarak bir önceki değerin bir fazlasıdır; bu da yine 33’tür. Interrupt handler’ında bir k yazdırıyor ve interrupt controller’a interrupt sonu sinyalini gönderiyoruz.
Şimdi, bir tuşa bastığımızda ekranda bir k belirdiğini görüyoruz. Ancak bu yalnızca bastığımız ilk tuş için çalışıyor. Tuşlara basmaya devam etsek bile, ekranda daha fazla k belirmiyor. Bunun nedeni, basılan tuşun scancode adı verilen kodunu okuyana kadar klavye controller’ının başka bir interrupt göndermeyecek olmasıdır.
🔗Scancode’ları Okumak
Hangi tuşa basıldığını öğrenmek için, klavye controller’ını sorgulamamız gerekir. Bunu, PS/2 controller’ının veri portundan, yani 0x60 numaralı I/O portundan okuyarak yaparız:
// src/interrupts.rs içinde
extern "x86-interrupt" fn keyboard_interrupt_handler(
_stack_frame: InterruptStackFrame)
{
use x86_64::instructions::port::Port;
let mut port = Port::new(0x60);
let scancode: u8 = unsafe { port.read() };
print!("{}", scancode);
unsafe {
PICS.lock()
.notify_end_of_interrupt(InterruptIndex::Keyboard.as_u8());
}
}Klavyenin veri portundan bir bayt okumak için x86_64 crate’inin Port tipini kullanıyoruz. Bu bayta scancode denir ve tuş basışını/bırakışını temsil eder. Scancode ile şimdilik, onu ekrana yazdırmak dışında bir şey yapmıyoruz:

Yukarıdaki görsel, yavaşça “123” yazdığımı gösteriyor. Bitişik tuşların bitişik scancode’lara sahip olduğunu ve bir tuşa basmanın, onu bırakmaktan farklı bir scancode’a neden olduğunu görüyoruz. Peki scancode’ları gerçek tuş eylemlerine tam olarak nasıl çeviririz?
🔗Scancode’ları Yorumlamak
Scancode’lar ile tuşlar arasındaki eşleme için üç farklı standart vardır; bunlara scancode setleri denir. Üçü de erken IBM bilgisayarlarının klavyelerine dayanır: IBM XT, IBM 3270 PC ve IBM AT. Sonraki bilgisayarlar neyse ki yeni scancode setleri tanımlama eğilimini sürdürmedi, bunun yerine mevcut setleri öykünüp (emulate) genişletti. Günümüzde, çoğu klavye üç setten herhangi birini öykünecek şekilde yapılandırılabilir.
Varsayılan olarak, PS/2 klavyeler scancode seti 1’i (“XT”) öykünür. Bu sette, bir scancode baytının alt 7 biti tuşu tanımlar ve en anlamlı bit, bunun bir basış (“0”) mı yoksa bir bırakış (“1”) mı olduğunu tanımlar. Orijinal IBM XT klavyesinde bulunmayan tuşlar, örneğin tuş takımındaki enter tuşu, art arda iki scancode üretir: bir 0xe0 kaçış (escape) baytı ve ardından tuşu temsil eden bir bayt. Tüm set 1 scancode’larının ve karşılık gelen tuşlarının listesi için OSDev Wiki’sine göz atın.
Scancode’ları tuşlara çevirmek için bir match ifadesi kullanabiliriz:
// src/interrupts.rs içinde
extern "x86-interrupt" fn keyboard_interrupt_handler(
_stack_frame: InterruptStackFrame)
{
use x86_64::instructions::port::Port;
let mut port = Port::new(0x60);
let scancode: u8 = unsafe { port.read() };
// yeni
let key = match scancode {
0x02 => Some('1'),
0x03 => Some('2'),
0x04 => Some('3'),
0x05 => Some('4'),
0x06 => Some('5'),
0x07 => Some('6'),
0x08 => Some('7'),
0x09 => Some('8'),
0x0a => Some('9'),
0x0b => Some('0'),
_ => None,
};
if let Some(key) = key {
print!("{}", key);
}
unsafe {
PICS.lock()
.notify_end_of_interrupt(InterruptIndex::Keyboard.as_u8());
}
}Yukarıdaki kod, 0-9 sayı tuşlarının basışlarını çevirir ve diğer tüm tuşları yok sayar. Her scancode’a bir karakter veya None atamak için bir match ifadesi kullanır. Ardından, isteğe bağlı key’i yapısöküme (destructure) uğratmak için if let kullanır. Pattern’de aynı key değişken adını kullanarak, önceki bildirimi gölgeleriz (shadow); bu, Rust’ta Option tiplerini yapısöküme uğratmak için yaygın bir örüntüdür.
Artık sayılar yazabiliriz:

Diğer tuşları çevirmek de aynı şekilde çalışır. Neyse ki, scancode seti 1 ve 2’nin scancode’larını çevirmek için pc-keyboard adında bir crate var, bu yüzden bunu kendimiz uygulamamıza gerek yok. Crate’i kullanmak için, onu Cargo.toml’umuza ekliyor ve lib.rs’imizde içe aktarıyoruz:
# Cargo.toml içinde
[dependencies]
pc-keyboard = "0.7.0"Artık bu crate’i keyboard_interrupt_handler’ımızı yeniden yazmak için kullanabiliriz:
// src/interrupts.rs içinde
extern "x86-interrupt" fn keyboard_interrupt_handler(
_stack_frame: InterruptStackFrame)
{
use pc_keyboard::{layouts, DecodedKey, HandleControl, Keyboard, ScancodeSet1};
use spin::Mutex;
use x86_64::instructions::port::Port;
static KEYBOARD: Mutex<Keyboard<layouts::Us104Key, ScancodeSet1>> =
Mutex::new(Keyboard::new(
ScancodeSet1::new(),
layouts::Us104Key,
HandleControl::Ignore,
));
let mut keyboard = KEYBOARD.lock();
let mut port = Port::new(0x60);
let scancode: u8 = unsafe { port.read() };
if let Ok(Some(key_event)) = keyboard.add_byte(scancode) {
if let Some(key) = keyboard.process_keyevent(key_event) {
match key {
DecodedKey::Unicode(character) => print!("{}", character),
DecodedKey::RawKey(key) => print!("{:?}", key),
}
}
}
unsafe {
PICS.lock()
.notify_end_of_interrupt(InterruptIndex::Keyboard.as_u8());
}
}Bir Mutex tarafından korunan statik bir Keyboard nesnesi oluşturuyoruz. Keyboard::new ve ScancodeSet1::new yapıcıları const fn olduğundan, KEYBOARD statik’i derleme zamanında başlatılabilir; bu yüzden burada lazy_static makrosuna ihtiyacımız yok. Keyboard’u bir ABD klavye düzeni ve scancode seti 1 ile başlatıyoruz. HandleControl parametresi, ctrl+[a-z]’yi U+0001’den U+001A’ya kadar Unicode karakterlerine eşlemeye olanak tanır. Bunu yapmak istemiyoruz, bu yüzden ctrl’yi normal tuşlar gibi ele almak için Ignore seçeneğini kullanıyoruz.
Her interrupt’ta Mutex’i kilitliyor, scancode’u klavye controller’ından okuyor ve onu, scancode’u bir Option<KeyEvent>’e çeviren add_byte metoduna geçiriyoruz. KeyEvent, olaya neden olan tuşu ve bunun bir basış mı yoksa bırakış olayı mı olduğunu içerir.
Bu tuş olayını yorumlamak için, onu mümkünse tuş olayını bir karaktere çeviren process_keyevent metoduna geçiriyoruz. Örneğin, A tuşunun bir basış olayını, shift tuşuna basılıp basılmadığına bağlı olarak küçük harf a veya büyük harf A karakterine çevirir.
Bu değiştirilmiş interrupt handler’ıyla, artık metin yazabiliriz:
🔗Klavyeyi Yapılandırmak
Bir PS/2 klavyenin bazı yönlerini yapılandırmak mümkündür; örneğin hangi scancode setini kullanması gerektiğini. Bu yazı zaten yeterince uzun olduğu için bunu burada ele almayacağız, ancak OSDev Wiki’sinde olası yapılandırma komutlarına genel bir bakış var.
🔗Özet
Bu yazı, harici interrupt’ların nasıl etkinleştirileceğini ve işleneceğini açıkladı. 8259 PIC’i ve onun birincil/ikincil düzenini, interrupt numaralarının yeniden eşlenmesini ve “interrupt sonu” sinyalini öğrendik. Donanım timer’ı ve klavye için handler’lar uyguladık ve CPU’yu bir sonraki interrupt’a kadar durduran hlt komutunu öğrendik.
Artık kernel’imizle etkileşim kurabiliyoruz ve küçük bir kabuk (shell) veya basit oyunlar oluşturmak için bazı temel yapı taşlarına sahibiz.
🔗Sırada ne var?
Timer interrupt’ları bir işletim sistemi için olmazsa olmazdır, çünkü çalışan süreci periyodik olarak kesip kernel’in kontrolü yeniden ele geçirmesine olanak tanırlar. Kernel daha sonra farklı bir sürece geçebilir ve paralel olarak çalışan birden çok süreç yanılsaması oluşturabilir.
Ancak süreçler veya thread’ler oluşturmadan önce, onlar için bellek ayırmanın bir yoluna ihtiyacımız var. Sonraki yazılar, bu temel yapı taşını sağlamak için bellek yönetimini inceleyecek.
Yorumlar
Bir sorunuz mu var, geri bildirim paylaşmak veya fikirlerinizi tartışmak mı istiyorsunuz? Buraya yorum bırakmaktan çekinmeyin! Lütfen İngilizce kullanın ve Rust'ın davranış kurallarına uyun. Bu yorum dizisi doğrudan GitHub'daki bir tartışmaya bağlıdır, dolayısıyla isterseniz oraya da yorum yapabilirsiniz.
Instead of authenticating the giscus application, you can also comment directly on GitHub.
Mümkünse yorumlarınızı İngilizce bırakınız.