最小内核
翻译内容: 这是对原文章 A Minimal Rust Kernel 的社区中文翻译。它可能不完整,过时或者包含错误。可以在 这个 Issue 上评论和提问!
翻译者: @luojia65, @Rustin-Liu 和 @liuyuran. With contributions from @JiangengDong.
在这篇文章中,我们将基于 x86架构(the x86 architecture),使用 Rust 语言,编写一个最小化的 64 位内核。我们将从上一章中构建的独立式可执行程序开始,构建自己的内核;它将向显示器打印字符串,并能被打包为一个能够引导启动的磁盘映像(disk image)。
此博客在 GitHub 上公开开发. 如果您有任何问题或疑问,请在此处打开一个 issue。 您也可以在底部发表评论. 这篇文章的完整源代码可以在 [post-02] post branch 分支中找到。
目录
🔗引导启动
当我们启动电脑时,主板 ROM内存储的固件(firmware)将会运行:它将负责电脑的加电自检(power-on self test),可用内存(available RAM)的检测,以及 CPU 和其它硬件的预加载。这之后,它将寻找一个可引导的存储介质(bootable disk),并开始引导启动其中的内核(kernel)。
x86 架构支持两种固件标准: BIOS(Basic Input/Output System)和 UEFI(Unified Extensible Firmware Interface)。其中,BIOS 标准显得陈旧而过时,但实现简单,并为 1980 年代后的所有 x86 设备所支持;相反地,UEFI 更现代化,功能也更全面,但开发和构建更复杂(至少从我的角度看是如此)。
在这篇文章中,我们暂时只提供 BIOS 固件的引导启动方式,但是UEFI支持也已经在计划中了。如果你希望帮助我们推进它,请查阅这份 Github issue。
🔗BIOS 启动
几乎所有的 x86 硬件系统都支持 BIOS 启动,这也包含新型的、基于 UEFI、用模拟 BIOS(emulated BIOS)的方式向后兼容的硬件系统。这可以说是一件好事情,因为无论是上世纪还是现在的硬件系统,你都只需编写同样的引导启动逻辑;但这种兼容性有时也是 BIOS 引导启动最大的缺点,因为这意味着在系统启动前,你的 CPU 必须先进入一个 16 位系统兼容的实模式(real mode),这样 1980 年代古老的引导固件才能够继续使用。
让我们从头开始,理解一遍 BIOS 启动的过程。
当电脑启动时,主板上特殊的闪存中存储的 BIOS 固件将被加载。BIOS 固件将会加电自检、初始化硬件,然后它将寻找一个可引导的存储介质。如果找到了,那电脑的控制权将被转交给引导程序(bootloader):一段存储在存储介质的开头的、512字节长度的程序片段。大多数的引导程序长度都大于512字节——所以通常情况下,引导程序都被切分为一段优先启动、长度不超过512字节、存储在介质开头的第一阶段引导程序(first stage bootloader),和一段随后由其加载的、长度可能较长、存储在其它位置的第二阶段引导程序(second stage bootloader)。
引导程序必须决定内核的位置,并将内核加载到内存。引导程序还需要将 CPU 从 16 位的实模式,先切换到 32 位的保护模式(protected mode),最终切换到 64 位的长模式(long mode):此时,所有的 64 位寄存器和整个主内存(main memory)才能被访问。引导程序的第三个作用,是从 BIOS 查询特定的信息,并将其传递到内核;如查询和传递内存映射表(memory map)。
编写一个引导程序并不是一个简单的任务,因为这需要使用汇编语言,而且必须经过许多意图并不明显的步骤——比如,把一些魔术数字(magic number)写入某个寄存器。因此,我们不会讲解如何编写自己的引导程序,而是推荐 bootimage 工具——它能够自动并且方便地为你的内核准备一个引导程序。
🔗Multiboot 标准
每个操作系统都实现自己的引导程序,而这只对单个操作系统有效。为了避免这样的僵局,1995 年,自由软件基金会(Free Software Foundation)颁布了一个开源的引导程序标准——Multiboot。这个标准定义了引导程序和操作系统间的统一接口,所以任何适配 Multiboot 的引导程序,都能用来加载任何同样适配了 Multiboot 的操作系统。GNU GRUB 是一个可供参考的 Multiboot 实现,它也是最热门的Linux系统引导程序之一。
要编写一款适配 Multiboot 的内核,我们只需要在内核文件开头,插入被称作 Multiboot头(Multiboot header)的数据片段。这让 GRUB 很容易引导任何操作系统,但是,GRUB 和 Multiboot 标准也有一些可预知的问题:
- 它们只支持 32 位的保护模式。这意味着,在引导之后,你依然需要配置你的 CPU,让它切换到 64 位的长模式;
- 它们被设计为精简引导程序,而不是精简内核。举个例子,内核需要以调整过的默认页长度(default page size)被链接,否则 GRUB 将无法找到内核的 Multiboot 头。另一个例子是引导信息(boot information),这个包含着大量与架构有关的数据,会在引导启动时,被直接传到操作系统,而不会经过一层清晰的抽象;
- GRUB 和 Multiboot 标准并没有被详细地解释,阅读相关文档需要一定经验;
- 为了创建一个能够被引导的磁盘映像,我们在开发时必须安装 GRUB:这加大了基于 Windows 或 macOS 开发内核的难度。
出于这些考虑,我们决定不使用 GRUB 或者 Multiboot 标准。然而,Multiboot 支持功能也在 bootimage 工具的开发计划之中,所以从原理上讲,如果选用 bootimage 工具,在未来使用 GRUB 引导你的系统内核是可能的。 如果你对编写一个支持 Mutiboot 标准的内核有兴趣,可以查阅 初版文档。
🔗UEFI
(截至此时,我们并未提供UEFI相关教程,但我们确实有此意向。如果你愿意提供一些帮助,请在 Github issue 告知我们,不胜感谢。)
🔗最小内核
现在我们已经明白电脑是如何启动的,那也是时候编写我们自己的内核了。我们的小目标是,创建一个内核的磁盘映像,它能够在启动时,向屏幕输出一行“Hello World!”;我们的工作将基于上一章构建的独立式可执行程序。
如果读者还有印象的话,在上一章,我们使用 cargo 构建了一个独立的二进制程序;但这个程序依然基于特定的操作系统平台:因平台而异,我们需要定义不同名称的函数,且使用不同的编译指令。这是因为在默认情况下,cargo 会为特定的宿主系统(host system)构建源码,比如为你正在运行的系统构建源码。这并不是我们想要的,因为我们的内核不应该基于另一个操作系统——我们想要编写的,就是这个操作系统。确切地说,我们想要的是,编译为一个特定的目标系统(target system)。
🔗安装 Nightly Rust
Rust 语言有三个发行频道(release channel),分别是 stable、beta 和 nightly。《Rust 程序设计语言》中对这三个频道的区别解释得很详细,可以前往这里看一看。为了搭建一个操作系统,我们需要一些只有 nightly 会提供的实验性功能,所以我们需要安装一个 nightly 版本的 Rust。
要管理安装好的 Rust,我强烈建议使用 rustup:它允许你同时安装 nightly、beta 和 stable 版本的编译器,而且让更新 Rust 变得容易。你可以输入 rustup override add nightly 来选择在当前目录使用 nightly 版本的 Rust。或者,你也可以在项目根目录添加一个名称为 rust-toolchain、内容为 nightly 的文件。要检查你是否已经安装了一个 nightly,你可以运行 rustc --version:返回的版本号末尾应该包含-nightly。
Nightly 版本的编译器允许我们在源码的开头插入特性标签(feature flag),来自由选择并使用大量实验性的功能。举个例子,要使用实验性的内联汇编(asm!宏),我们可以在 main.rs 的顶部添加 #![feature(asm)]。要注意的是,这样的实验性功能不稳定(unstable),意味着未来的 Rust 版本可能会修改或移除这些功能,而不会有预先的警告过渡。因此我们只有在绝对必要的时候,才应该使用这些特性。
🔗目标配置清单
通过 --target 参数,cargo 支持不同的目标系统。这个目标系统可以使用一个目标三元组(target triple)来描述,它描述了 CPU 架构、平台供应者、操作系统和应用程序二进制接口(Application Binary Interface, ABI)。比方说,目标三元组 x86_64-unknown-linux-gnu 描述一个基于 x86_64 架构 CPU 的、没有明确的平台供应者的 linux 系统,它遵循 GNU 风格的 ABI。Rust 支持许多不同的目标三元组,包括安卓系统对应的 arm-linux-androideabi 和 WebAssembly使用的wasm32-unknown-unknown。
为了编写我们的目标系统,并且鉴于我们需要做一些特殊的配置(比如没有依赖的底层操作系统),已经支持的目标三元组都不能满足我们的要求。幸运的是,只需使用一个 JSON 文件,Rust 便允许我们定义自己的目标系统;这个文件常被称作目标配置清单(target specification)。比如,一个描述 x86_64-unknown-linux-gnu 目标系统的配置清单大概长这样:
{
"llvm-target": "x86_64-unknown-linux-gnu",
"data-layout": "e-m:e-p270:32:32-p271:32:32-p272:64:64-i64:64-i128:128-f80:128-n8:16:32:64-S128",
"arch": "x86_64",
"target-endian": "little",
"target-pointer-width": 64,
"target-c-int-width": 32,
"os": "linux",
"executables": true,
"linker-flavor": "gcc",
"pre-link-args": ["-m64"],
"morestack": false
}
一个配置清单中包含多个配置项(field)。大多数的配置项都是 LLVM 需求的,它们将配置为特定平台生成的代码。打个比方,data-layout 配置项定义了不同的整数、浮点数、指针类型的长度;另外,还有一些 Rust 用作条件编译的配置项,如 target-pointer-width。还有一些类型的配置项,定义了这个包该如何被编译,例如,pre-link-args 配置项指定了应该向链接器(linker)传入的参数。
我们将把我们的内核编译到 x86_64 架构,所以我们的配置清单将和上面的例子相似。现在,我们来创建一个名为 x86_64-blog_os.json 的文件——当然也可以选用自己喜欢的文件名——里面包含这样的内容:
{
"llvm-target": "x86_64-unknown-none",
"data-layout": "e-m:e-p270:32:32-p271:32:32-p272:64:64-i64:64-i128:128-f80:128-n8:16:32:64-S128",
"arch": "x86_64",
"target-endian": "little",
"target-pointer-width": 64,
"target-c-int-width": 32,
"os": "none",
"executables": true
}
需要注意的是,因为我们要在裸机(bare metal)上运行内核,我们已经修改了 llvm-target 的内容,并将 os 配置项的值改为 none。
我们还需要添加下面与编译相关的配置项:
"linker-flavor": "ld.lld",
"linker": "rust-lld",
在这里,我们不使用平台默认提供的链接器,因为它可能不支持 Linux 目标系统。为了链接我们的内核,我们使用跨平台的 LLD链接器(LLD linker),它是和 Rust 一起打包发布的。
"panic-strategy": "abort",
这个配置项的意思是,我们的编译目标不支持 panic 时的栈展开(stack unwinding),所以我们选择直接在 panic 时中止(abort on panic)。这和在 Cargo.toml 文件中添加 panic = "abort" 选项的作用是相同的,所以我们可以不在这里的配置清单中填写这一项。
"disable-redzone": true,
我们正在编写一个内核,所以我们迟早要处理中断。要安全地实现这一点,我们必须禁用一个与红区(redzone)有关的栈指针优化:因为此时,这个优化可能会导致栈被破坏。如果需要更详细的资料,请查阅我们的一篇关于 禁用红区 的短文。
"features": "-mmx,-sse,+soft-float",
features 配置项被用来启用或禁用某个目标 CPU 特征(CPU feature)。通过在它们前面添加-号,我们将 mmx 和 sse 特征禁用;添加前缀+号,我们启用了 soft-float 特征。
mmx 和 sse 特征决定了是否支持单指令多数据流(Single Instruction Multiple Data,SIMD)相关指令,这些指令常常能显著地提高程序层面的性能。然而,在内核中使用庞大的 SIMD 寄存器,可能会造成较大的性能影响:因为每次程序中断时,内核不得不储存整个庞大的 SIMD 寄存器以备恢复——这意味着,对每个硬件中断或系统调用,完整的 SIMD 状态必须存到主存中。由于 SIMD 状态可能相当大(512~1600 个字节),而中断可能时常发生,这些额外的存储与恢复操作可能显著地影响效率。为解决这个问题,我们对内核禁用 SIMD(但这不意味着禁用内核之上的应用程序的 SIMD 支持)。
禁用 SIMD 产生的一个问题是,x86_64 架构的浮点数指针运算默认依赖于 SIMD 寄存器。我们的解决方法是,启用 soft-float 特征,它将使用基于整数的软件功能,模拟浮点数指针运算。
为了让读者的印象更清晰,我们撰写了一篇关于 禁用 SIMD 的短文。
"rustc-abi": "x86-softfloat"
As we want to use the soft-float feature, we also need to tell the Rust compiler rustc that we want to use the corresponding ABI. We can do that by setting the rustc-abi field to x86-softfloat.
现在,我们将各个配置项整合在一起。我们的目标配置清单应该长这样:
{
"llvm-target": "x86_64-unknown-none",
"data-layout": "e-m:e-p270:32:32-p271:32:32-p272:64:64-i64:64-i128:128-f80:128-n8:16:32:64-S128",
"arch": "x86_64",
"target-endian": "little",
"target-pointer-width": 64,
"target-c-int-width": 32,
"os": "none",
"executables": true,
"linker-flavor": "ld.lld",
"linker": "rust-lld",
"panic-strategy": "abort",
"disable-redzone": true,
"features": "-mmx,-sse,+soft-float",
"rustc-abi": "x86-softfloat"
}
🔗编译内核
要编译我们的内核,我们将使用 Linux 系统的编写风格(这可能是 LLVM 的默认风格)。这意味着,我们需要把前一篇文章中编写的入口点重命名为 _start:
// src/main.rs
#![no_std] // 不链接 Rust 标准库
#![no_main] // 禁用所有 Rust 层级的入口点
use core::panic::PanicInfo;
/// 这个函数将在 panic 时被调用
#[panic_handler]
fn panic(_info: &PanicInfo) -> ! {
loop {}
}
#[unsafe(no_mangle)] // 不重整函数名
pub extern "C" fn _start() -> ! {
// 因为编译器会寻找一个名为 `_start` 的函数,所以这个函数就是入口点
// 默认命名为 `_start`
loop {}
}
注意的是,无论你开发使用的是哪类操作系统,你都需要将入口点命名为 _start。前一篇文章中编写的 Windows 系统和 macOS 对应的入口点不应该被保留。
通过把 JSON 文件名传入 --target 选项,我们现在可以开始编译我们的内核。让我们试试看:
> cargo build --target x86_64-blog_os.json
error: `.json` target specs require -Zjson-target-spec
毫不意外的编译失败了,错误信息告诉我们自定义 JSON 目标规范是一个不稳定的功能,需要显式启用。这是因为 JSON 目标文件的格式尚未被认为是稳定的,因此在未来的 Rust 版本中可能会发生变化。有关更多信息,请参阅自定义 JSON 目标规范的跟踪 issue。
🔗json-target-spec 选项
要启用对自定义 JSON 目标规范的支持,我们需要创建一个 cargo 配置 文件,即 .cargo/config.toml(.cargo 文件夹应该在 src 文件夹旁边),并写入以下语句:
# in .cargo/config.toml
[unstable]
json-target-spec = true
这会启用不稳定的 json-target-spec 功能,允许我们使用自定义的 JSON 目标文件。
有了这个配置后,让我们再次尝试编译:
> cargo build --target x86_64-blog_os.json
error[E0463]: can't find crate for `core`
现在我们看到了一个不同的错误!错误信息告诉我们编译器没有找到 core 这个crate,它包含了Rust语言中的部分基础类型,如 Result、Option、迭代器等等,并且它还会隐式链接到 no_std 特性里面。
通常状况下,core crate以预编译库(precompiled library)的形式与 Rust 编译器一同发布——这时,core crate只对支持的宿主系统有效,而对我们自定义的目标系统无效。如果我们想为其它系统编译代码,我们需要为这些系统重新编译整个 core crate。
🔗build-std 选项
此时就到了cargo中 build-std 特性 登场的时刻,该特性允许你按照自己的需要重编译 core 等标准crate,而不需要使用Rust安装程序内置的预编译版本。 但是该特性是全新的功能,到目前为止尚未完全完成,所以它被标记为 “unstable” 且仅被允许在 Nightly Rust 编译器 环境下调用。
要启用该特性,你需要在 cargo 配置 文件 .cargo/config.toml 中添加以下语句:
# in .cargo/config.toml
[unstable]
json-target-spec = true
build-std = ["core", "compiler_builtins"]
该配置会告知cargo需要重新编译 core 和 compiler_builtins 这两个crate,其中 compiler_builtins 是 core 的必要依赖。 另外重编译需要提供源码,我们可以使用 rustup component add rust-src 命令来下载它们。
Note: 仅 2020-07-15 之后的Rust nightly版本支持 unstable.build-std 配置项。
在设定 unstable.build-std 配置项并安装 rust-src 组件之后,我们就可以开始编译了:
> cargo build --target x86_64-blog_os.json
Compiling core v0.0.0 (/…/rust/src/libcore)
Compiling rustc-std-workspace-core v1.99.0 (/…/rust/src/tools/rustc-std-workspace-core)
Compiling compiler_builtins v0.1.32
Compiling blog_os v0.1.0 (/…/blog_os)
Finished dev [unoptimized + debuginfo] target(s) in 0.29 secs
如你所见,在执行 cargo build 之后, core、rustc-std-workspace-core (compiler_builtins 的依赖)和 compiler_builtins crate被重新编译了。
🔗内存相关函数
目前来说,Rust编译器假定所有内置函数(built-in functions)在所有系统内都是存在且可用的。事实上这个前提只对了一半,
绝大多数内置函数都可以被 compiler_builtins 提供,而这个crate刚刚已经被我们重编译过了,然而部分内存相关函数是需要操作系统相关的标准C库提供的。
比如,memset(该函数可以为一个内存块内的所有比特进行赋值)、memcpy(将一个内存块里的数据拷贝到另一个内存块)以及memcmp(比较两个内存块的数据)。
好在我们的内核暂时还不需要用到这些函数,但是不要高兴的太早,当我们编写更丰富的功能(比如拷贝数据结构)时就会用到了。
现在我们当然无法提供操作系统相关的标准C库,所以我们需要使用其他办法提供这些东西。一个显而易见的途径就是自己实现 memset 这些函数,但不要忘记加入 #[unsafe(no_mangle)] 语句,以避免编译时被自动重命名。 当然,这样做很危险,底层函数中最细微的错误也会将程序导向不可预知的未来。比如,你可能在实现 memcpy 时使用了一个 for 循环,然而 for 循环本身又会调用 IntoIterator::into_iter 这个trait方法,这个方法又会再次调用 memcpy,此时一个无限递归就产生了,所以还是使用经过良好测试的既存实现更加可靠。
幸运的是,compiler_builtins 事实上自带了所有相关函数的实现,只是在默认情况下,出于避免和标准C库发生冲突的考量被禁用掉了,此时我们需要将 build-std-features 配置项设置为 ["compiler-builtins-mem"] 来启用这个特性。如同 build-std 配置项一样,该特性可以使用 -Z 参数启用,也可以在 .cargo/config.toml 中使用 unstable 配置集启用。现在我们的配置文件中的相关部分是这样子的:
# in .cargo/config.toml
[unstable]
json-target-spec = true
build-std-features = ["compiler-builtins-mem"]
build-std = ["core", "compiler_builtins"]
(compiler-builtins-mem 特性是在 这个PR 中被引入的,所以你的Rust nightly更新时间必须晚于 2020-09-30。)
该参数为 compiler_builtins 启用了 mem 特性,至于具体效果,就是已经在内部通过 #[unsafe(no_mangle)] 向链接器提供了 memcpy 等函数的实现。
经过这些修改,我们的内核已经完成了所有编译所必需的函数,那么让我们继续对代码进行完善。
🔗设置默认编译目标
每次调用 cargo build 命令都需要传入 --target 参数很麻烦吧?其实我们可以复写掉默认值,从而省略这个参数,只需要在 .cargo/config.toml 中加入以下 cargo 配置:
# in .cargo/config.toml
[build]
target = "x86_64-blog_os.json"
这个配置会告知 cargo 使用 x86_64-blog_os.json 这个文件作为默认的 --target 参数,此时只输入短短的一句 cargo build 就可以编译到指定平台了。如果你对其他配置项感兴趣,亦可以查阅 官方文档。
那么现在我们已经可以用 cargo build 完成程序编译了,然而被成功调用的 _start 函数的函数体依然是一个空空如也的循环,是时候往屏幕上输出一点什么了。
🔗向屏幕打印字符
要做到这一步,最简单的方式是写入 VGA 字符缓冲区(VGA text buffer):这是一段映射到 VGA 硬件的特殊内存片段,包含着显示在屏幕上的内容。通常情况下,它能够存储 25 行、80 列共 2000 个字符单元(character cell);每个字符单元能够显示一个 ASCII 字符,也能设置这个字符的前景色(foreground color)和背景色(background color)。输出到屏幕的字符大概长这样:

我们将在下篇文章中详细讨论 VGA 字符缓冲区的内存布局;目前我们只需要知道,这段缓冲区的地址是 0xb8000,且每个字符单元包含一个 ASCII 码字节和一个颜色字节。
我们的实现就像这样:
static HELLO: &[u8] = b"Hello World!";
#[unsafe(no_mangle)]
pub extern "C" fn _start() -> ! {
let vga_buffer = 0xb8000 as *mut u8;
for (i, &byte) in HELLO.iter().enumerate() {
unsafe {
*vga_buffer.offset(i as isize * 2) = byte;
*vga_buffer.offset(i as isize * 2 + 1) = 0xb;
}
}
loop {}
}
在这段代码中,我们预先定义了一个字节字符串(byte string)类型的静态变量(static variable),名为 HELLO。我们首先将整数 0xb8000 转换(cast)为一个裸指针(raw pointer)。这之后,我们迭代 HELLO 的每个字节,使用 enumerate 获得一个额外的序号变量 i。在 for 语句的循环体中,我们使用 offset 偏移裸指针,解引用它,来将字符串的每个字节和对应的颜色字节——0xb 代表淡青色——写入内存位置。
要注意的是,所有的裸指针内存操作都被一个 unsafe 语句块(unsafe block)包围。这是因为,此时编译器不能确保我们创建的裸指针是有效的;一个裸指针可能指向任何一个你内存位置;直接解引用并写入它,也许会损坏正常的数据。使用 unsafe 语句块时,程序员其实在告诉编译器,自己保证语句块内的操作是有效的。事实上,unsafe 语句块并不会关闭 Rust 的安全检查机制;它允许你多做的事情只有四件。
使用 unsafe 语句块要求程序员有足够的自信,所以必须强调的一点是,肆意使用 unsafe 语句块并不是 Rust 编程的一贯方式。在缺乏足够经验的前提下,直接在 unsafe 语句块内操作裸指针,非常容易把事情弄得很糟糕;比如,在不注意的情况下,我们很可能会意外地操作缓冲区以外的内存。
在这样的前提下,我们希望最小化 unsafe 语句块的使用。使用 Rust 语言,我们能够将不安全操作将包装为一个安全的抽象模块。举个例子,我们可以创建一个 VGA 缓冲区类型,把所有的不安全语句封装起来,来确保从类型外部操作时,无法写出不安全的代码:通过这种方式,我们只需要最少的 unsafe 语句块来确保我们不破坏内存安全(memory safety)。在下一篇文章中,我们将会创建这样的 VGA 缓冲区封装。
🔗启动内核
既然我们已经有了一个能够打印字符的可执行程序,是时候把它运行起来试试看了。首先,我们将编译完毕的内核与引导程序链接,来创建一个引导映像;这之后,我们可以在 QEMU 虚拟机中运行它,或者通过 U 盘在真机上运行。
🔗创建引导映像
要将可执行程序转换为可引导的映像(bootable disk image),我们需要把它和引导程序链接。这里,引导程序将负责初始化 CPU 并加载我们的内核。
编写引导程序并不容易,所以我们不编写自己的引导程序,而是使用已有的 bootloader 包;无需依赖于 C 语言,这个包基于 Rust 代码和内联汇编,实现了一个五脏俱全的 BIOS 引导程序。为了用它启动我们的内核,我们需要将它添加为一个依赖项,在 Cargo.toml 中添加下面的代码:
# in Cargo.toml
[dependencies]
bootloader = "0.9"
** 注意:** 当前环境仅兼容 bootloader v0.9 版本。较新的版本需考虑使用其他的构建工具,否则会导致构建出现未知错误。
只添加引导程序为依赖项,并不足以创建一个可引导的磁盘映像;我们还需要内核编译完成之后,将内核和引导程序组合在一起。然而,截至目前,原生的 cargo 并不支持在编译完成后添加其它步骤(详见这个 issue)。
为了解决这个问题,我们建议使用 bootimage 工具——它将会在内核编译完毕后,将它和引导程序组合在一起,最终创建一个能够引导的磁盘映像。我们可以使用下面的命令来安装这款工具:
cargo install bootimage
为了运行 bootimage 以及编译引导程序,我们需要安装 rustup 模块 llvm-tools-preview——我们可以使用 rustup component add llvm-tools-preview 来安装这个工具。
成功安装 bootimage 后,创建一个可引导的磁盘映像就变得相当容易。我们来输入下面的命令:
> cargo bootimage
可以看到的是,bootimage 工具开始使用 cargo build 编译你的内核,所以它将增量编译我们修改后的源码。在这之后,它会编译内核的引导程序,这可能将花费一定的时间;但和所有其它依赖包相似的是,在首次编译后,产生的二进制文件将被缓存下来——这将显著地加速后续的编译过程。最终,bootimage 将把内核和引导程序组合为一个可引导的磁盘映像。
运行这行命令之后,我们应该能在 target/x86_64-blog_os/debug 目录内找到我们的映像文件 bootimage-blog_os.bin。我们可以在虚拟机内启动它,也可以刻录到 U 盘上以便在真机上启动。(需要注意的是,因为文件格式不同,这里的 bin 文件并不是一个光驱映像,所以将它刻录到光盘不会起作用。)
事实上,在这行命令背后,bootimage 工具执行了三个步骤:
- 编译我们的内核为一个 ELF(Executable and Linkable Format)文件;
- 编译引导程序为独立的可执行文件;
- 将内核 ELF 文件按字节拼接(append by bytes)到引导程序的末端。
当机器启动时,引导程序将会读取并解析拼接在其后的 ELF 文件。这之后,它将把程序片段映射到分页表(page table)中的虚拟地址(virtual address),清零 BSS段(BSS segment),还将创建一个栈。最终它将读取入口点地址(entry point address)——我们程序中 _start 函数的位置——并跳转到这个位置。
🔗在 QEMU 中启动内核
现在我们可以在虚拟机中启动内核了。为了在QEMU 中启动内核,我们使用下面的命令:
> qemu-system-x86_64 -drive format=raw,file=target/x86_64-blog_os/debug/bootimage-blog_os.bin
warning: TCG doesn't support requested feature: CPUID.01H:ECX.vmx [bit 5]
然后就会弹出一个独立窗口:
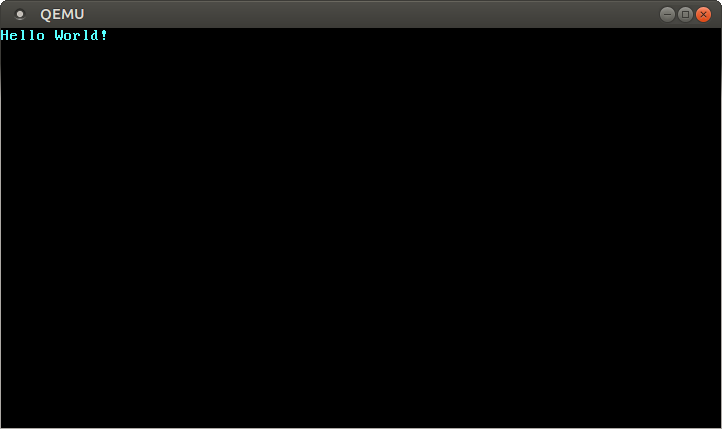
我们可以看到,屏幕窗口已经显示出 “Hello World!” 字符串。祝贺你!
🔗在真机上运行内核
我们也可以使用 dd 工具把内核写入 U 盘,以便在真机上启动。可以输入下面的命令:
> dd if=target/x86_64-blog_os/debug/bootimage-blog_os.bin of=/dev/sdX && sync
在这里,sdX 是U盘的设备名(device name)。请注意,在选择设备名的时候一定要极其小心,因为目标设备上已有的数据将全部被擦除。
写入到 U 盘之后,你可以在真机上通过引导启动你的系统。视情况而定,你可能需要在 BIOS 中打开特殊的启动菜单,或者调整启动顺序。需要注意的是,bootloader 包暂时不支持 UEFI,所以我们并不能在 UEFI 机器上启动。
🔗使用 cargo run
要让在 QEMU 中运行内核更轻松,我们可以设置在 cargo 配置文件中设置 runner 配置项:
# in .cargo/config.toml
[target.'cfg(target_os = "none")']
runner = "bootimage runner"
在这里,target.'cfg(target_os = "none")' 筛选了三元组中宿主系统设置为 "none" 的所有编译目标——这将包含我们的 x86_64-blog_os.json 目标。另外,runner 的值规定了运行 cargo run 使用的命令;这个命令将在成功编译后执行,而且会传递可执行文件的路径为第一个参数。官方提供的 cargo 文档讲述了更多的细节。
命令 bootimage runner 由 bootimage 包提供,参数格式经过特殊设计,可以用于 runner 命令。它将给定的可执行文件与项目的引导程序依赖项链接,然后在 QEMU 中启动它。bootimage 包的 README文档 提供了更多细节和可以传入的配置参数。
现在我们可以使用 cargo run 来编译内核并在 QEMU 中启动了。
🔗下篇预告
在下篇文章中,我们将细致地探索 VGA 字符缓冲区,并包装它为一个安全的接口。我们还将基于它实现 println! 宏。
评论
你有问题需要解决,想要分享反馈,或者讨论更多的想法吗?请随时在这里留下评论!请使用尽量使用英文并遵循 Rust 的 code of conduct. 这个讨论串将与 discussion on GitHub 直接连接,所以你也可以直接在那边发表评论
Instead of authenticating the giscus application, you can also comment directly on GitHub.
请尽可能使用英语评论。