Asignación en el Heap
Contenido Traducido: Esta es una traducción comunitaria del post Heap Allocation. Puede estar incompleta, desactualizada o contener errores. ¡Por favor reporta cualquier problema!
Traducción por @dobleuber.
Este post añade soporte para la asignación en el heap a nuestro núcleo. Primero, proporciona una introducción a la memoria dinámica y muestra cómo el borrow checker (verificador de préstamos) previene errores comunes de asignación. Luego, implementa la interfaz básica de asignación de Rust, crea una región de memoria en el heap y configura una crate de asignador. Al final de este post, todos los tipos de asignación y recolección de la crate alloc integrada estarán disponibles para nuestro núcleo.
Este blog se desarrolla abiertamente en GitHub. Si tienes algún problema o preguntas, por favor abre un issue allí. También puedes dejar comentarios al final. El código fuente completo de este post se puede encontrar en la rama post-10.
Tabla de Contenidos
🔗Variables Locales y Estáticas
Actualmente usamos dos tipos de variables en nuestro núcleo: variables locales y variables static. Las variables locales se almacenan en el call stack y son válidas solo hasta que la función envolvente retorna. Las variables estáticas se almacenan en una ubicación de memoria fija y viven siempre durante toda la duración del programa.
🔗Variables Locales
Las variables locales se almacenan en el call stack, que es una estructura de datos tipo pila que soporta operaciones de push y pop. En cada entrada de función, los parámetros, la dirección de retorno y las variables locales de la función llamada son empujadas por el compilador:

El ejemplo anterior muestra la pila de llamadas después de que la función outer llamó a la función inner. Vemos que la pila de llamadas contiene primero las variables locales de outer. En la llamada a inner, el parámetro 1 y la dirección de retorno para la función fueron empujados. Luego, se transfirió el control a inner, que empujó sus variables locales.
Después de que la función inner retorna, su parte de la pila de llamadas se desapila nuevamente y solo permanecen las variables locales de outer:

Vemos que las variables locales de inner solo viven hasta que la función retorna. El compilador de Rust refuerza estas duraciones y lanza un error cuando usamos un valor durante demasiado tiempo, por ejemplo, cuando intentamos devolver una referencia a una variable local:
fn inner(i: usize) -> &'static u32 {
let z = [1, 2, 3];
&z[i]
}
(ejecutar el ejemplo en el playground)
Si bien devolver una referencia no tiene sentido en este ejemplo, hay casos en los que queremos que una variable viva más que la función. Ya hemos visto tal caso en nuestro núcleo cuando intentamos cargar una tabla de descriptores de interrupción y tuvimos que usar una variable static para extender la duración.
🔗Variables Estáticas
Las variables estáticas se almacenan en una ubicación de memoria fija separada de la pila. Esta ubicación de memoria se asigna en tiempo de compilación por el enlazador y se codifica en el ejecutable. Las variables estáticas viven durante toda la ejecución del programa, por lo que tienen la duración 'static y siempre pueden ser referenciadas desde variables locales:
![El mismo ejemplo de outer/inner, excepto que inner tiene un static Z: [u32; 3] = [1,2,3]; y devuelve una referencia &Z[i]](https://os.phil-opp.com/es/heap-allocation/call-stack-static.svg)
Cuando la función inner retorna en el ejemplo anterior, su parte de la pila de llamadas se destruye. Las variables estáticas viven en un rango de memoria separado que nunca se destruye, por lo que la referencia &Z[1] sigue siendo válida después del retorno.
Aparte de la duración 'static, las variables estáticas también tienen la propiedad útil de que su ubicación es conocida en tiempo de compilación, de modo que no se necesita ninguna referencia para acceder a ellas. Utilizamos esa propiedad para nuestra macro println: Al usar un static Writer internamente, no se necesita una referencia &mut Writer para invocar la macro, lo que es muy útil en manejadores de excepciones, donde no tenemos acceso a variables adicionales.
Sin embargo, esta propiedad de las variables estáticas trae un inconveniente crucial: son de solo lectura por defecto. Rust refuerza esto porque ocurriría una condición de carrera si, por ejemplo, dos hilos modificaran una variable estática al mismo tiempo. La única forma de modificar una variable estática es encapsularla en un tipo Mutex, que asegura que solo exista una sola referencia &mut en cualquier momento. Ya utilizamos un Mutex para nuestro buffer Writer estático VGA.
🔗Memoria Dinámica
Las variables locales y estáticas ya son muy poderosas juntas y habilitan la mayoría de los casos de uso. Sin embargo, vimos que ambas tienen sus limitaciones:
- Las variables locales solo viven hasta el final de la función o bloque envolvente. Esto se debe a que viven en la pila de llamadas y se destruyen después de que la función envolvente retorna.
- Las variables estáticas siempre viven durante toda la ejecución del programa, por lo que no hay forma de recuperar y reutilizar su memoria cuando ya no se necesitan. Además, tienen semánticas de propiedad poco claras y son accesibles desde todas las funciones, por lo que necesitan ser protegidas por un
Mutexcuando queremos modificarlas.
Otra limitación de las variables locales y estáticas es que tienen un tamaño fijo. Por lo que no pueden almacenar una colección que crezca dinámicamente a medida que se añaden más elementos. (Hay propuestas para valores rvalue sin tamaño en Rust que permitirían variables locales con tamaño dinámico, pero solo funcionan en algunos casos específicos.)
Para eludir estas desventajas, los lenguajes de programación suelen soportar una tercera región de memoria para almacenar variables llamada heap. El heap soporta asignación de memoria dinámica en tiempo de ejecución a través de dos funciones llamadas allocate y deallocate. Funciona de la siguiente manera: La función allocate devuelve un fragmento de memoria libre del tamaño especificado que se puede usar para almacenar una variable. Esta variable vive hasta que se libera llamando a la función deallocate con una referencia a la variable.
Pasemos por un ejemplo:
![La función inner llama allocate(size_of([u32; 3])), escribe z.write([1,2,3]); y devuelve (z as *mut u32).offset(i). En el valor devuelto y, la función outer realiza deallocate(y, size_of(u32)).](https://os.phil-opp.com/es/heap-allocation/call-stack-heap.svg)
Aquí la función inner utiliza memoria del heap en lugar de variables estáticas para almacenar z. Primero asigna un bloque de memoria del tamaño requerido, que devuelve un *mut u32 puntero bruto. Luego usa el método ptr::write para escribir el arreglo [1,2,3] en él. En el último paso, utiliza la función offset para calcular un puntero al elemento i-ésimo y luego lo devuelve. (Nota que omitimos algunos casts requeridos y bloques unsafe en esta función de ejemplo por brevedad.)
La memoria asignada vive hasta que se libera explícitamente mediante una llamada a deallocate. Por lo tanto, el puntero devuelto sigue siendo válido incluso después de que inner haya retornado y su parte de la pila de llamadas se haya destruido. La ventaja de usar memoria del heap en comparación con memoria estática es que la memoria se puede reutilizar después de que se libera, lo que hacemos a través de la llamada deallocate en outer. Después de esa llamada, la situación se ve así:
![La pila de llamadas contiene las variables locales de outer, el heap contiene z[0] y z[2], pero ya no z[1].](https://os.phil-opp.com/es/heap-allocation/call-stack-heap-freed.svg)
Vemos que el espacio de z[1] está libre nuevamente y puede ser reutilizado para la siguiente llamada a allocate. Sin embargo, también vemos que z[0] y z[2] nunca se liberan porque nunca los desapilamos. Tal error se llama fuga de memoria y es a menudo la causa del consumo excesivo de memoria de los programas (solo imagina lo que sucede cuando llamamos a inner repetidamente en un bucle). Esto puede parecer malo, pero hay tipos de errores mucho más peligrosos que pueden ocurrir con la asignación dinámica.
🔗Errores Comunes
Apartando las fugas de memoria, que son desafortunadas pero no hacen que el programa sea vulnerable a atacantes, hay dos tipos comunes de errores con consecuencias más severas:
- Cuando accidentalmente continuamos usando una variable después de llamar a
deallocatesobre ella, tenemos una vulnerabilidad de uso después de liberar. Tal error causa comportamiento indefinido y a menudo puede ser explotado por atacantes para ejecutar código arbitrario. - Cuando accidentalmente liberamos una variable dos veces, tenemos una vulnerabilidad de double-free. Esto es problemático porque podría liberar una asignación diferente que se había asignado en el mismo lugar después de la primera llamada a
deallocate. Así, puede llevar nuevamente a una vulnerabilidad de uso después de liberar.
Estos tipos de vulnerabilidades son bien conocidos, por lo que uno podría esperar que las personas hayan aprendido a evitarlas hasta ahora. Pero no, tales vulnerabilidades todavía se encuentran regularmente, por ejemplo, esta [vulnerabilidad de uso después de liberar en Linux][linux vulnerability] (2019), que permitió la ejecución de código arbitrario. Una búsqueda en la web como use-after-free linux {año actual} probablemente siempre arrojará resultados. Esto muestra que incluso los mejores programadores no siempre son capaces de manejar correctamente la memoria dinámica en proyectos complejos.
Para evitar estos problemas, muchos lenguajes, como Java o Python, gestionan la memoria dinámica automáticamente utilizando una técnica llamada recolección de basura. La idea es que el programador nunca invoca deallocate manualmente. En cambio, el programa se pausa regularmente y se escanea en busca de variables de heap no utilizadas, que luego se liberan automáticamente. Por lo tanto, las vulnerabilidades mencionadas no pueden ocurrir. Los inconvenientes son el costo de rendimiento de la verificación regular y las largas pausas que probablemente ocurran.
Rust adopta un enfoque diferente al problema: utiliza un concepto llamado propiedad que puede verificar la corrección de las operaciones de memoria dinámica en tiempo de compilación. Por lo tanto, no se necesita recolección de basura para evitar las vulnerabilidades mencionadas, lo que significa que no hay costos de rendimiento. Otra ventaja de este enfoque es que el programador aún tiene un control fino sobre el uso de la memoria dinámica, al igual que con C o C++.
🔗Asignaciones en Rust
En lugar de permitir que el programador llame manualmente a allocate y deallocate, la biblioteca estándar de Rust proporciona tipos de abstracción que llaman a estas funciones implícitamente. El tipo más importante es Box, que es una abstracción para un valor asignado en el heap. Proporciona una función constructora Box::new que toma un valor, llama a allocate con el tamaño del valor y luego mueve el valor al espacio recién asignado en el heap. Para liberar la memoria del heap nuevamente, el tipo Box implementa el Drop trait para llamar a deallocate cuando sale del alcance:
{
let z = Box::new([1,2,3]);
[…]
} // z sale del alcance y se llama a `deallocate`
Este patrón tiene el extraño nombre la adquisición de recursos es inicialización (o RAII para abreviar). Se originó en C++, donde se utiliza para implementar un tipo de abstracción similar llamado std::unique_ptr.
Tal tipo por sí solo no es suficiente para prevenir todos los errores de uso después de liberar, ya que los programadores aún pueden mantener referencias después de que el Box sale del alcance y la correspondencia de memoria del heap se libera:
let x = {
let z = Box::new([1,2,3]);
&z[1]
}; // z sale del alcance y se llama a `deallocate`
println!("{}", x);
Aquí es donde entra la propiedad de Rust. Asigna una duración abstracta a cada referencia, que es el ámbito en el que la referencia es válida. En el ejemplo anterior, la referencia x se toma del arreglo z, por lo que se vuelve inválida después de que z sale del alcance. Cuando ejecutas el ejemplo anterior en el playground, verás que el compilador de Rust efectivamente lanza un error:
error[E0597]: `z[_]` no vive lo suficiente
--> src/main.rs:4:9
|
2 | let x = {
| - préstamo almacenado más tarde aquí
3 | let z = Box::new([1,2,3]);
4 | &z[1]
| ^^^^^ valor prestado no vive lo suficiente
5 | }; // z sale del alcance y se llama a `deallocate`
| - `z[_]` se destruye aquí mientras aún está prestado
La terminología puede ser un poco confusa al principio. Tomar una referencia a un valor se llama préstamo del valor, ya que es similar a un préstamo en la vida real: tienes acceso temporal a un objeto pero debes devolverlo en algún momento, y no debes destruirlo. Al verificar que todos los préstamos terminan antes de que se destruya un objeto, el compilador de Rust puede garantizar que no pueda ocurrir una situación de uso después de liberar.
El sistema de propiedad de Rust va aún más lejos, previniendo no solo errores de uso después de liberar, sino también proporcionando seguridad de memoria, como lenguajes recolectores de basura como Java o Python. Además, garantiza seguridad de hilo y es, por lo tanto, incluso más seguro que esos lenguajes en código multihilo. Y lo más importante, todas estas verificaciones ocurren en tiempo de compilación, por lo que no hay sobrecarga en tiempo de ejecución en comparación con la gestión de memoria escrita a mano en C.
🔗Casos de Uso
Ahora conocemos los básicos de la asignación de memoria dinámica en Rust, pero ¿cuándo deberíamos usarla? Hemos llegado muy lejos con nuestro núcleo sin asignación de memoria dinámica, así que ¿por qué la necesitamos ahora?
Primero, la asignación de memoria dinámica siempre conlleva un poco de sobrecarga de rendimiento, ya que necesitamos encontrar un espacio libre en el heap para cada asignación. Por esta razón, las variables locales son generalmente preferibles, especialmente en código de núcleo sensible al rendimiento. Sin embargo, hay casos en los que la asignación de memoria dinámica es la mejor opción.
Como regla básica, se requiere memoria dinámica para variables que tienen una duración dinámica o un tamaño variable. El tipo más importante con una duración dinámica es Rc, que cuenta las referencias a su valor envuelto y lo libera después de que todas las referencias han salido del alcance. Ejemplos de tipos con un tamaño variable son Vec, String y otros tipos de colección que crecen dinámicamente cuando se añaden más elementos. Estos tipos funcionan al asignar una mayor cantidad de memoria cuando se llenan, copiando todos los elementos y luego liberando la antigua asignación.
Para nuestro núcleo, necesitaríamos principalmente los tipos de colección, por ejemplo, para almacenar una lista de tareas activas al implementar la multitarea en futuros posts.
🔗La Interfaz del Asignador
El primer paso en implementar un asignador de heap es agregar una dependencia en la crate integrada alloc. Al igual que la crate core, es un subconjunto de la biblioteca estándar que además contiene los tipos de asignación y colección. Para agregar la dependencia en alloc, añadimos lo siguiente a nuestro lib.rs:
// en src/lib.rs
extern crate alloc;
A diferencia de las dependencias normales, no necesitamos modificar el Cargo.toml. La razón es que la crate alloc se envía con el compilador de Rust como parte de la biblioteca estándar, por lo que el compilador ya conoce la crate. Al agregar esta declaración extern crate, especificamos que el compilador debería intentar incluirla. (Históricamente, todas las dependencias necesitaban una declaración extern crate, que ahora es opcional).
Dado que estamos compilando para un objetivo personalizado, no podemos usar la versión precompilada de alloc que se envía con la instalación de Rust. En su lugar, debemos decirle a cargo que recompilar la crate desde la fuente. Podemos hacerlo añadiendo esta a la matriz unstable.build-std en nuestro archivo .cargo/config.toml:
# en .cargo/config.toml
[unstable]
build-std = ["core", "compiler_builtins", "alloc"]
Ahora el compilador recompilará e incluirá la crate alloc en nuestro núcleo.
La razón por la que la crate alloc está deshabilitada por defecto en crates #[no_std] es que tiene requisitos adicionales. Cuando intentamos compilar nuestro proyecto ahora, veremos estos requisitos como errores:
error: no se encontró ningún asignador de memoria global, pero se requiere uno; vincular a std o agregar #[global_allocator] a un elemento estático que implemente el trait GlobalAlloc.
El error ocurre porque la crate alloc requiere un asignador de heap, que es un objeto que proporciona las funciones allocate y deallocate. En Rust, los asignadores de heap se describen mediante el trait GlobalAlloc, que se menciona en el mensaje de error. Para establecer el asignador de heap para la crate, el atributo #[global_allocator] debe aplicarse a una variable static que implemente el trait GlobalAlloc.
🔗El Trait GlobalAlloc
El trait GlobalAlloc define las funciones que debe proporcionar un asignador de heap. El trait es especial porque casi nunca se usa directamente por el programador. En su lugar, el compilador insertará automáticamente las llamadas apropiadas a los métodos del trait al utilizar los tipos de asignación y colección de alloc.
Dado que necesitaremos implementar el trait para todos nuestros tipos de asignadores, vale la pena echar un vistazo más de cerca a su declaración:
pub unsafe trait GlobalAlloc {
unsafe fn alloc(&self, layout: Layout) -> *mut u8;
unsafe fn dealloc(&self, ptr: *mut u8, layout: Layout);
unsafe fn alloc_zeroed(&self, layout: Layout) -> *mut u8 { ... }
unsafe fn realloc(
&self,
ptr: *mut u8,
layout: Layout,
new_size: usize
) -> *mut u8 { ... }
}
Define los dos métodos requeridos alloc y dealloc, que corresponden a las funciones allocate y deallocate que usamos en nuestros ejemplos:
- El método
alloctoma una instancia deLayoutcomo argumento, que describe el tamaño y alineación deseados que debe tener el bloque de memoria asignada. Devuelve un puntero bruto al primer byte del bloque de memoria asignada. En lugar de un valor de error explícito, el métodoallocdevuelve un puntero nulo para señalar un error de asignación. Esto es un poco no idiomático, pero tiene la ventaja de que es fácil envolver asignadores de sistema existentes ya que utilizan la misma convención. - El método
dealloces el contraparte y es responsable de liberar un bloque de memoria nuevamente. Recibe dos argumentos: el puntero devuelto porallocy elLayoutque se usó para la asignación.
El trait además define los dos métodos alloc_zeroed y realloc con implementaciones predeterminadas:
- El método
alloc_zeroedes equivalente a llamar aallocy luego establecer el bloque de memoria asignado a cero, lo cual es exactamente lo que hace la implementación predeterminada proporcionada. Una implementación de asignador puede reemplazar las implementaciones predeterminadas con una implementación personalizada más eficiente si es posible. - El método
reallocpermite aumentar o disminuir una asignación. La implementación predeterminada asigna un nuevo bloque de memoria con el tamaño deseado y copia todo el contenido de la asignación anterior. Nuevamente, una implementación de asignador podría proporcionar probablemente una implementación más eficiente de este método, por ejemplo, aumentando/disminuyendo la asignación en su lugar si es posible.
🔗Inseguridad
Una cosa a notar es que tanto el trait en sí como todos los métodos del trait se declaran como unsafe:
- La razón para declarar el trait como
unsafees que el programador debe garantizar que la implementación del trait para un tipo de asignador sea correcta. Por ejemplo, el métodoallocnunca debe devolver un bloque de memoria que ya está siendo usado en otro lugar porque esto causaría comportamiento indefinido. - De manera similar, la razón por la que los métodos son
unsafees que el llamador debe asegurar diversas invariantes al llamar a los métodos, por ejemplo, que elLayoutpasado aallocespecifica un tamaño no nulo. Esto no es realmente relevante en la práctica ya que los métodos son normalmente llamados directamente por el compilador, que asegura que se cumplan los requisitos.
🔗Un DummyAllocator
Ahora que sabemos qué debe proporcionar un tipo de asignador, podemos crear un simple asignador nulo. Para eso, creamos un nuevo módulo allocator:
// en src/lib.rs
pub mod allocator;
Nuestro asignador nulo hace lo mínimo absoluto para implementar el trait y siempre devuelve un error cuando se llama a alloc. Se ve así:
// en src/allocator.rs
use alloc::alloc::{GlobalAlloc, Layout};
use core::ptr::null_mut;
pub struct Dummy;
unsafe impl GlobalAlloc for Dummy {
unsafe fn alloc(&self, _layout: Layout) -> *mut u8 {
null_mut()
}
unsafe fn dealloc(&self, _ptr: *mut u8, _layout: Layout) {
panic!("dealloc no debería ser llamado nunca")
}
}
La estructura no necesita ningún campo, así que la creamos como un tipo de tamaño cero. Como se mencionó anteriormente, siempre devolvemos el puntero nulo de alloc, que corresponde a un error de asignación. Dado que el asignador nunca devuelve memoria, una llamada a dealloc nunca debe ocurrir. Por esta razón, simplemente hacemos panic en el método dealloc. Los métodos alloc_zeroed y realloc tienen implementaciones predeterminadas, por lo que no necesitamos proporcionar implementaciones para ellos.
Ahora tenemos un asignador simple, pero aún tenemos que decirle al compilador de Rust que debe usar este asignador. Aquí es donde entra el atributo #[global_allocator].
🔗El Atributo #[global_allocator]
El atributo #[global_allocator] le dice al compilador de Rust qué instancia de asignador debe usar como el asignador global de heap. El atributo solo es aplicable a un static que implemente el trait GlobalAlloc. Registremos una instancia de nuestro asignador Dummy como el asignador global:
// en src/allocator.rs
#[global_allocator]
static ALLOCATOR: Dummy = Dummy;
Dado que el asignador Dummy es un tipo de tamaño cero, no necesitamos especificar ningún campo en la expresión de inicialización.
Con este static, los errores de compilación deberían estar arreglados. Ahora podemos usar los tipos de asignación y colección de alloc. Por ejemplo, podemos usar un Box para asignar un valor en el heap:
// en src/main.rs
extern crate alloc;
use alloc::boxed::Box;
fn kernel_main(boot_info: &'static BootInfo) -> ! {
// […] imprimir "¡Hola Mundo!", llamar a `init`, crear `mapper` y `frame_allocator`
let x = Box::new(41);
// […] llamar a `test_main` en modo de prueba
println!("¡No se cayó!");
blog_os::hlt_loop();
}
Nota que necesitamos especificar la declaración extern crate alloc en nuestro main.rs también. Esto es requerido porque las partes de lib.rs y main.rs se tratan como crates separadas. Sin embargo, no necesitamos crear otro static #[global_allocator] ya que el asignador global se aplica a todas las crates en el proyecto. De hecho, especificar un asignador adicional en otra crate sería un error.
Cuando ejecutamos el código anterior, vemos que ocurre un panic:
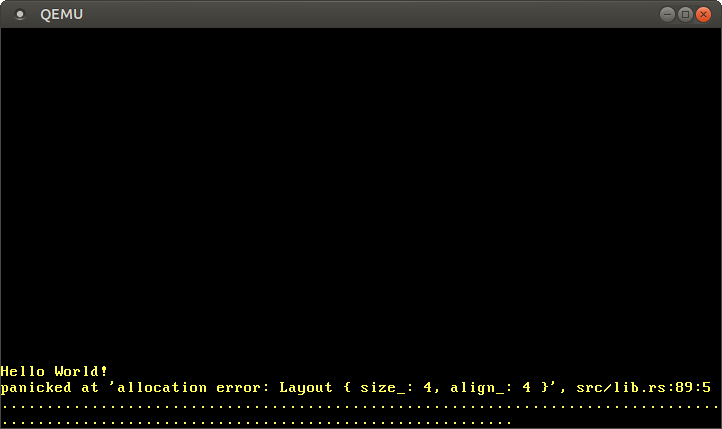
El panic ocurre porque la función Box::new llama implícitamente a la función alloc del asignador global. Nuestro asignador nulo siempre devuelve un puntero nulo, así que cada asignación falla. Para arreglar esto, necesitamos crear un asignador que realmente devuelva memoria utilizable.
🔗Creando un Heap para el Núcleo
Antes de que podamos crear un asignador adecuado, primero necesitamos crear una región de memoria heap de la que el asignador pueda asignar memoria. Para hacer esto, necesitamos definir un rango de memoria virtual para la región del heap y luego mapear esta región a un marco físico. Ve la publicación “Introducción a la Paginación” para una visión general de la memoria virtual y las tablas de páginas.
El primer paso es definir una región de memoria virtual para el heap. Podemos elegir cualquier rango de dirección virtual que nos guste, siempre que no esté ya utilizado para otra región de memoria. Definámoslo como la memoria que comienza en la dirección 0x_4444_4444_0000 para que podamos reconocer fácilmente un puntero de heap más tarde:
// en src/allocator.rs
pub const HEAP_START: usize = 0x_4444_4444_0000;
pub const HEAP_SIZE: usize = 100 * 1024; // 100 KiB
Establecemos el tamaño del heap en 100 KiB por ahora. Si necesitamos más espacio en el futuro, simplemente podemos aumentarlo.
Si tratamos de usar esta región del heap ahora, ocurrirá un fallo de página ya que la región de memoria virtual no está mapeada a la memoria física todavía. Para resolver esto, creamos una función init_heap que mapea las páginas del heap usando la API de Mapper que introdujimos en la publicación “Implementación de Paginación”:
// en src/allocator.rs
use x86_64::{
structures::paging::{
mapper::MapToError, FrameAllocator, Mapper, Page, PageTableFlags, Size4KiB,
},
VirtAddr,
};
pub fn init_heap(
mapper: &mut impl Mapper<Size4KiB>,
frame_allocator: &mut impl FrameAllocator<Size4KiB>,
) -> Result<(), MapToError<Size4KiB>> {
let page_range = {
let heap_start = VirtAddr::new(HEAP_START as u64);
let heap_end = heap_start + HEAP_SIZE - 1u64;
let heap_start_page = Page::containing_address(heap_start);
let heap_end_page = Page::containing_address(heap_end);
Page::range_inclusive(heap_start_page, heap_end_page)
};
for page in page_range {
let frame = frame_allocator
.allocate_frame()
.ok_or(MapToError::FrameAllocationFailed)?;
let flags = PageTableFlags::PRESENT | PageTableFlags::WRITABLE;
unsafe {
mapper.map_to(page, frame, flags, frame_allocator)?.flush()
};
}
Ok(())
}
La función toma referencias mutables a una instancia Mapper y a una instancia FrameAllocator, ambas limitadas a páginas de 4 KiB usando Size4KiB como parámetro genérico. El valor de retorno de la función es un Result con el tipo unidad () como variante de éxito y un MapToError como variante de error, que es el tipo de error devuelto por el método Mapper::map_to. Reutilizar el tipo de error tiene sentido aquí porque el método map_to es la principal fuente de errores en esta función.
La implementación se puede dividir en dos partes:
-
Creando el rango de páginas: Para crear un rango de las páginas que queremos mapear, convertimos el puntero
HEAP_STARTa un tipoVirtAddr. Luego calculamos la dirección del final del heap a partir de ella sumando elHEAP_SIZE. Queremos un límite inclusivo (la dirección del último byte del heap), por lo que restamos 1. A continuación, convertimos las direcciones en tiposPageusando la funcióncontaining_address. Finalmente, creamos un rango de páginas a partir de las páginas inicial y final utilizando la funciónPage::range_inclusive. -
Mapeo de las páginas: El segundo paso es mapear todas las páginas del rango de páginas que acabamos de crear. Para eso, iteramos sobre estas páginas usando un bucle
for. Para cada página, hacemos lo siguiente:-
Asignamos un marco físico al que la página debería ser mapeada usando el método
FrameAllocator::allocate_frame. Este método devuelveNonecuando no quedan más marcos. Nos ocupamos de ese caso al mapearlo a un errorMapToError::FrameAllocationFaileda través del métodoOption::ok_ory luego aplicando el operador de signo de interrogación para retornar temprano en caso de error. -
Establecemos el flag
PRESENTrequerido y el flagWRITABLEpara la página. Con estos flags, tanto los accesos de lectura como de escritura están permitidos, lo que tiene sentido para la memoria del heap. -
Usamos el método
Mapper::map_topara crear el mapeo en la tabla de páginas activa. El método puede fallar, así que usamos el operador de signo de interrogación otra vez para avanzar el error al llamador. En caso de éxito, el método devuelve una instancia deMapperFlushque podemos usar para actualizar el buffer de traducción de direcciones utilizando el métodoflush.
-
El último paso es llamar a esta función desde nuestro kernel_main:
// en src/main.rs
fn kernel_main(boot_info: &'static BootInfo) -> ! {
use blog_os::allocator; // nueva importación
use blog_os::memory::{self, BootInfoFrameAllocator};
println!("¡Hola Mundo{}!", "");
blog_os::init();
let phys_mem_offset = VirtAddr::new(boot_info.physical_memory_offset);
let mut mapper = unsafe { memory::init(phys_mem_offset) };
let mut frame_allocator = unsafe {
BootInfoFrameAllocator::init(&boot_info.memory_map)
};
// nueva
allocator::init_heap(&mut mapper, &mut frame_allocator)
.expect("falló la inicialización del heap");
let x = Box::new(41);
// […] llamar a `test_main` en contexto de prueba
println!("¡No se cayó!");
blog_os::hlt_loop();
}
Mostramos la función completa aquí para contexto. Las únicas nuevas líneas son la importación de blog_os::allocator y la llamada a la función allocator::init_heap. En caso de que la función init_heap devuelva un error, hacemos panic usando el método Result::expect ya que actualmente no hay una forma sensata para nosotros de manejar este error.
Ahora tenemos una región de memoria heap mapeada que está lista para ser utilizada. La llamada a Box::new aún utiliza nuestro antiguo asignador Dummy, así que todavía verás el error “sin memoria” cuando lo ejecutes. Arreglemos esto utilizando un asignador apropiado.
🔗Usando una Crate de Asignador
Dado que implementar un asignador es algo complicado, empezamos usando una crate de asignador externa. Aprenderemos cómo implementar nuestro propio asignador en el próximo post.
Una crate de asignador simple para aplicaciones no_std es la crate linked_list_allocator. Su nombre proviene del hecho de que utiliza una estructura de datos de lista enlazada para hacer un seguimiento de las regiones de memoria desasignadas. Ve la próxima publicación para una explicación más detallada de este enfoque.
Para usar la crate, primero necesitamos agregar una dependencia en ella en nuestro Cargo.toml:
# en Cargo.toml
[dependencies]
linked_list_allocator = "0.9.0"
Luego podemos reemplazar nuestro asignador nulo con el asignador proporcionado por la crate:
// en src/allocator.rs
use linked_list_allocator::LockedHeap;
#[global_allocator]
static ALLOCATOR: LockedHeap = LockedHeap::empty();
La estructura se llama LockedHeap porque usa el tipo spinning_top::Spinlock para la sincronización. Esto es requerido porque múltiples hilos podrían acceder al static ALLOCATOR al mismo tiempo. Como siempre, al utilizar un spinlock o un mutex, debemos tener cuidado de no causar accidentalmente un deadlock. Esto significa que no debemos realizar ninguna asignación en manejadores de interrupciones, ya que pueden ejecutarse en cualquier momento y podrían interrumpir una asignación en progreso.
Configurar el LockedHeap como asignador global no es suficiente. La razón es que usamos la función constructora empty, que crea un asignador sin ninguna memoria de respaldo. Al igual que nuestro asignador nulo, siempre devuelve un error en alloc. Para arreglar esto, necesitamos inicializar el asignador después de crear el heap:
// en src/allocator.rs
pub fn init_heap(
mapper: &mut impl Mapper<Size4KiB>,
frame_allocator: &mut impl FrameAllocator<Size4KiB>,
) -> Result<(), MapToError<Size4KiB>> {
// […] mapear todas las páginas del heap a marcos físicos
// nueva
unsafe {
ALLOCATOR.lock().init(HEAP_START, HEAP_SIZE);
}
Ok(())
}
Usamos el método lock sobre el spinlock interno del tipo LockedHeap para obtener una referencia exclusiva a la instancia Heap envuelta, sobre la cual luego llamamos al método init con los límites del heap como argumentos. Como la función init ya intenta escribir en la memoria del heap, debemos inicializar el heap solo después de mapear las páginas del heap.
Después de inicializar el heap, ahora podemos usar todos los tipos de asignación y colección de la crate integrada alloc sin error:
// en src/main.rs
use alloc::{boxed::Box, vec, vec::Vec, rc::Rc};
fn kernel_main(boot_info: &'static BootInfo) -> ! {
// […] inicializar interrupciones, mapper, frame_allocator, heap
// asignar un número en el heap
let heap_value = Box::new(41);
println!("valor del heap en {:p}", heap_value);
// crear un vector de tamaño dinámico
let mut vec = Vec::new();
for i in 0..500 {
vec.push(i);
}
println!("vector en {:p}", vec.as_slice());
// crear un vector contado por referencias -> será liberado cuando el conteo llegue a 0
let reference_counted = Rc::new(vec![1, 2, 3]);
let cloned_reference = reference_counted.clone();
println!("el conteo de referencia actual es {}", Rc::strong_count(&cloned_reference));
core::mem::drop(reference_counted);
println!("el conteo de referencia ahora es {} ahora", Rc::strong_count(&cloned_reference));
// […] llamar a `test_main` en contexto de prueba
println!("¡No se cayó!");
blog_os::hlt_loop();
}
Este ejemplo de código muestra algunos usos de los tipos Box, Vec y Rc. Para los tipos Box y Vec, imprimimos los punteros del heap subyacente usando el especificador de formato [{:p}]. Para mostrar Rc, creamos un valor del heap contado por referencias y usamos la función Rc::strong_count para imprimir el conteo de referencias actual antes y después de soltar una de las instancias (usando core::mem::drop).
Cuando lo ejecutamos, vemos lo siguiente:
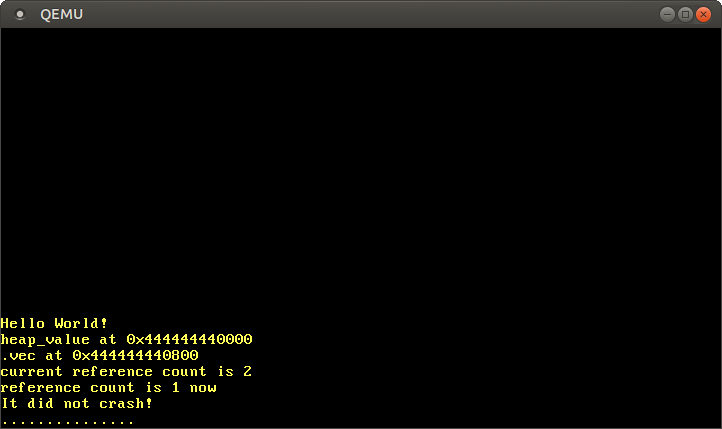
Como se esperaba, vemos que los valores Box y Vec viven en el heap, como lo indica el puntero que comienza con el prefijo 0x_4444_4444_*. El valor contado por referencias también se comporta como se esperaba, con el conteo de referencias siendo 2 después de la llamada a clone, y 1 nuevamente después de que se eliminó una de las instancias.
La razón por la que el vector comienza en el desplazamiento 0x800 no es que el valor Box sea 0x800 bytes grande, sino las reasignaciones que ocurren cuando el vector necesita aumentar su capacidad. Por ejemplo, cuando la capacidad del vector es 32 y tratamos de añadir el siguiente elemento, el vector asigna un nuevo arreglo de respaldo con una capacidad de 64 tras las escenas y copia todos los elementos. Luego libera la antigua asignación.
Por supuesto, hay muchos más tipos de asignación y colección en la crate alloc que ahora podemos usar todos en nuestro núcleo, incluyendo:
- el puntero contado por referencias seguro para hilos
Arc - el tipo de cadena propia
Stringy la macroformat! LinkedList- el búfer de anillo creciente
VecDeque - la cola de prioridad
BinaryHeap BTreeMapyBTreeSet
Estos tipos serán muy útiles cuando queramos implementar listas de hilos, colas de programación o soporte para async/await.
🔗Añadiendo una Prueba
Para asegurarnos de que no rompemos accidentalmente nuestro nuevo código de asignación, deberíamos agregar una prueba de integración para ello. Comenzamos creando un nuevo archivo tests/heap_allocation.rs con el siguiente contenido:
// en tests/heap_allocation.rs
#![no_std]
#![no_main]
#![feature(custom_test_frameworks)]
#![test_runner(blog_os::test_runner)]
#![reexport_test_harness_main = "test_main"]
extern crate alloc;
use bootloader::{entry_point, BootInfo};
use core::panic::PanicInfo;
entry_point!(main);
fn main(boot_info: &'static BootInfo) -> ! {
unimplemented!();
}
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
blog_os::test_panic_handler(info)
}
Reutilizamos las funciones test_runner y test_panic_handler de nuestro lib.rs. Dado que queremos probar asignaciones, habilitamos la crate alloc a través de la declaración extern crate alloc. Para más información sobre el boilerplate de la prueba, consulta la publicación Pruebas .
La implementación de la función main se ve así:
// en tests/heap_allocation.rs
fn main(boot_info: &'static BootInfo) -> ! {
use blog_os::allocator;
use blog_os::memory::{self, BootInfoFrameAllocator};
use x86_64::VirtAddr;
blog_os::init();
let phys_mem_offset = VirtAddr::new(boot_info.physical_memory_offset);
let mut mapper = unsafe { memory::init(phys_mem_offset) };
let mut frame_allocator = unsafe {
BootInfoFrameAllocator::init(&boot_info.memory_map)
};
allocator::init_heap(&mut mapper, &mut frame_allocator)
.expect("falló la inicialización del heap");
test_main();
loop {}
}
Es muy similar a la función kernel_main en nuestro main.rs, con las diferencias de que no invocamos println, no incluimos ninguna asignación de ejemplo y llamamos a test_main incondicionalmente.
Ahora estamos listos para agregar algunos casos de prueba. Primero, agregamos una prueba que realiza algunas asignaciones simples usando Box y verifica los valores asignados para asegurar que las asignaciones básicas funcionan:
// en tests/heap_allocation.rs
use alloc::boxed::Box;
#[test_case]
fn simple_allocation() {
let heap_value_1 = Box::new(41);
let heap_value_2 = Box::new(13);
assert_eq!(*heap_value_1, 41);
assert_eq!(*heap_value_2, 13);
}
Lo más importante es que esta prueba verifica que no ocurre error de asignación.
A continuación, construimos iterativamente un gran vector, para probar tanto grandes asignaciones como múltiples asignaciones (debido a reasignaciones):
// en tests/heap_allocation.rs
use alloc::vec::Vec;
#[test_case]
fn large_vec() {
let n = 1000;
let mut vec = Vec::new();
for i in 0..n {
vec.push(i);
}
assert_eq!(vec.iter().sum::<u64>(), (n - 1) * n / 2);
}
Verificamos la suma comparándola con la fórmula para la n-ésima suma parcial. Esto nos da algo de confianza en que los valores asignados son todos correctos.
Como tercera prueba, creamos diez mil asignaciones una tras otra:
// en tests/heap_allocation.rs
use blog_os::allocator::HEAP_SIZE;
#[test_case]
fn many_boxes() {
for i in 0..HEAP_SIZE {
let x = Box::new(i);
assert_eq!(*x, i);
}
}
Esta prueba asegura que el asignador reutiliza la memoria liberada para asignaciones subsecuentes, ya que de lo contrario se quedaría sin memoria. Esto puede parecer un requisito obvio para un asignador, pero hay diseños de asignador que no hacen esto. Un ejemplo es el diseño del asignador bump que se explicará en el próximo post.
¡Vamos a ejecutar nuestra nueva prueba de integración!
> cargo test --test heap_allocation
[…]
Ejecutando 3 pruebas
simple_allocation... [ok]
large_vec... [ok]
many_boxes... [ok]
¡Las tres pruebas tuvieron éxito! También puedes invocar cargo test (sin el argumento --test) para ejecutar todas las pruebas unitarias e integradas.
🔗Resumen
Este post dio una introducción a la memoria dinámica y explicó por qué y dónde se necesita. Vimos cómo el borrow checker previene vulnerabilidades comunes y aprendimos cómo funciona la API de asignación de Rust.
Después de crear una implementación mínima de la interfaz de asignador de Rust usando un asignador nulo, creamos una región de memoria heap adecuada para nuestro núcleo. Para eso, definimos un rango de direcciones virtuales para el heap y luego mapeamos todas las páginas de ese rango a marcos físicos usando el Mapper y FrameAllocator de la publicación anterior.
Finalmente, agregamos una dependencia en la crate linked_list_allocator para añadir un asignador adecuado a nuestro núcleo. Con este asignador, pudimos utilizar Box, Vec y otros tipos de asignación y colección de la crate alloc.
🔗¿Qué sigue?
Si bien ya hemos añadido soporte para la asignación en el heap en este post, dejamos la mayor parte del trabajo a la crate linked_list_allocator. El próximo post mostrará en detalle cómo se puede implementar un asignador desde cero. Presentará múltiples posibles diseños de asignadores, mostrará cómo implementar versiones simples de ellos y explicará sus ventajas y desventajas.
Comentarios
¿Tienes algún problema, quieres compartir comentarios o discutir más ideas? ¡No dudes en dejar un comentario aquí! Por favor, utiliza inglés y sigue el código de conducta de Rust. Este hilo de comentarios se vincula directamente con una discusión en GitHub, así que también puedes comentar allí si lo prefieres.
Instead of authenticating the giscus application, you can also comment directly on GitHub.
Por favor deja tus comentarios en inglés si es posible.