تخصيص Heap
المحتوى المترجم: هذه ترجمة مجتمعية لمقالة Heap Allocation. قد تكون غير مكتملة أو قديمة أو تحتوي على أخطاء. يرجى الإبلاغ عن أي مشاكل!
ترجمة بواسطة @mindfreq.
يضيف هذا المقال دعم تخصيص heap لنواتنا. أولاً، يقدم مقدمة عن الذاكرة الديناميكية ويُظهر كيف يمنع borrow checker أخطاء التخصيص الشائعة. ثم ينفذ واجهة التخصيص الأساسية في Rust، ويُنشئ منطقة ذاكرة heap، ويُعدّ allocator crate. في نهاية هذا المقال، ستكون جميع أنواع التخصيص والجمع لمكتبة alloc المدمجة متاحة لنواتنا.
هذا المدونة مطوّرة بشكل مفتوح على GitHub. إذا كان لديك أي مشاكل أو أسئلة، يرجى فتح issue هناك. يمكنك أيضًا ترك تعليقات في الأسفل. يمكن العثور على الكود المصدري الكامل لهذا المقال في فرع post-10.
جدول المحتويات
🔗المتغيرات المحلية والثابتة
نستخدم حاليًا نوعين من المتغيرات في نواتنا: local variables و static variables. local variables مخزنة على call stack وصالحة فقط حتى تعود الدالة المحيطة. static variables مخزنة في موقع ذاكرة ثابت وتعيش دائمًا طوال عمر البرنامج.
🔗المتغيرات المحلية
local variables مخزنة على call stack، الذي هو stack data structure يدعم عمليات push و pop. في كل دخول دالة، parameters و return address و local variables للدالة المُستدعاة يُدفعها المترجم:

يُظهر المثال أعلاه call stack بعد أن استدعت دالة outer دالة inner. نرى أن call stack تحتوي أولاً على local variables لـ outer. عند استدعاء inner، تم دفع parameter 1 و return address للدالة. ثم تم نقل التحكم إلى inner، التي دفعت local variables الخاصة بها.
بعد عودة دالة inner، تُزال جزءها من call stack وتبقى فقط local variables لـ outer:

نرى أن local variables لـ inner تعيش فقط حتى تعود الدالة. يفرض مترجم Rust هذه lifetimes ويرمي خطأ عندما نستخدم قيمة لفترة طويلة جدًا، على سبيل المثال عندما نحاول إعادة مرجع إلى local variable:
fn inner(i: usize) -> &'static u32 {
let z = [1, 2, 3];
&z[i]
}
بينما إعادة مرجع لا معنى لها في هذا المثال، هناك حالات نريد فيها متغير أن يعيش أطول من الدالة. رأينا بالفعل مثل هذه الحالة في نواتنا عندما حاولنا [تحميل interrupt descriptor table] واحتجنا لاستخدام متغير static لتمديد lifetime.
🔗المتغيرات الثابتة
static variables مخزنة في موقع ذاكرة ثابت منفصل عن stack. هذا الموقع يُعيّن وقت التجميع من قبل linker ويُرمز في executable. statics تعيش طوال تشغيل البرنامج، لذلك لها lifetime 'static ويمكن دائمًا الرجوع إليها من local variables:
![The same outer/inner example, except that inner has a static Z: [u32; 3] = [1,2,3]; and returns a &Z[i] reference](https://os.phil-opp.com/ar/heap-allocation/call-stack-static.svg)
عندما تعود دالة inner في المثال أعلاه، تُدمر جزءها من call stack. static variables تعيش في نطاق ذاكرة منفصل لا يُدمر أبدًا، لذلك مرجع &Z[1] لا يزال صالحًا بعد العودة.
بجانب lifetime 'static، لـ static variables أيضًا خاصية مفيدة أن موقعها معروف وقت التجميع، حتى لا يكون هناك حاجة لمرجع للوصول إليها. استفدنا من هذه الخاصية لـ macro println: باستخدام static Writer داخليًا، لا يكون هناك &mut Writer reference مطلوب لاستدعاء macro، الذي مفيد جدًا في exception handlers، حيث لا نصل إلى أي متغيرات إضافية.
ومع ذلك، هذه الخاصية لـ static variables تجلب عيبًا حاسمًا: هي read-only افتراضيًا. يفرض Rust هذا لأن data race سيحدث إذا، مثلًا، عدّل threadان static variable في نفس الوقت. الطريقة الوحيدة لتعديل static variable هي تغليفه في نوع Mutex، الذي يضمن أن &mut reference واحدة فقط موجودة في أي نقطة زمنية. استخدمنا بالفعل Mutex لـ static VGA buffer Writer.
🔗الذاكرة الديناميكية
local و static variables قويتان معًا وتمكنان معظم حالات الاستخدام. ومع ذلك، رأينا أن كلتاهما لها قيودها:
- local variables تعيش فقط حتى نهاية الدالة أو الكتلة المحيطة. هذا لأنها تعيش على call stack وتُدمر بعد عودة الدالة المحيطة.
- static variables تعيش دائمًا طوال تشغيل البرنامج، لذلك لا توجد طريقة لاستعادة وإعادة استخدام ذاكرتها عندما لم تعد مطلوبة. أيضًا، لها semantics ملكية غير واضحة وقابلة للوصول من جميع الدوال، لذلك تحتاج للحماية بـ
Mutexعندما نريد تعديلها.
قيود آخر لـ local و static variables هو أن لها حجم ثابت. لذلك لا يمكنها تخزين collection تنمو ديناميكيًا عند إضافة عناصر أكثر. (هناك مقترحات لـ unsized rvalues في Rust تسمح بـ local variables ذات حجم ديناميكي، لكنها تعمل فقط في بعض الحالات المحددة.)
لتجاوز هذه العيوب، تدعم لغات البرمجة غالبًا منطقة ذاكرة ثالثة لتخزين المتغيرات تسمى heap. يدعم heap dynamic memory allocation وقت التشغيل عبر دالتين تسميان allocate و deallocate. يعمل بالطريقة التالية: دالة allocate تُعيد chunk ذاكرة حرة بالحجم المحدد يمكن استخدامها لتخزين متغير. ثم يعيش هذا المتغير حتى يُحرر باستدعاء دالة deallocate بمرجع إلى المتغير.
لنمر عبر مثال:
![The inner function calls allocate(size_of([u32; 3])), writes z.write([1,2,3]);, and returns (z as *mut u32).offset(i). On the returned value y, the outer function performs deallocate(y, size_of(u32)).](https://os.phil-opp.com/ar/heap-allocation/call-stack-heap.svg)
هنا تستخدم دالة inner ذاكرة heap بدلاً من static variables لتخزين z. تخصص أولاً كتلة ذاكرة بالحجم المطلوب، التي تُعيد *mut u32 raw pointer. ثم تستخدم دالة ptr::write لكتابة المصفوفة [1,2,3] إليها. في الخطوة الأخيرة، تستخدم دالة offset لحساب مؤشر إلى العنصر الـ i ثم تُعيده. (لاحظ أننا أغفلنا بعض casts و unsafe blocks المطلوبة في هذه الدالة المثال للاختصار.)
الذاكرة المُخصصة تعيش حتى تُحرر صراحة عبر استدعاء deallocate. لذلك، المؤشر المُعاد لا يزال صالحًا حتى بعد عودة inner وتدمير جزءها من call stack. ميزة استخدام ذاكرة heap مقارنة بالذاكرة static هي أن الذاكرة يمكن إعادة استخدامها بعد تحريرها، الذي نفعله عبر استدعاء deallocate في outer. بعد ذلك الاستدعاء، تبدو الحالة كالتالي:
![The call stack contains the local variables of outer, the heap contains z[0] and z[2], but no longer z[1].](https://os.phil-opp.com/ar/heap-allocation/call-stack-heap-freed.svg)
نرى أن slot z[1] حر مرة أخرى ويمكن إعادة استخدامه لاستدعاء allocate التالي. ومع ذلك، نرى أيضًا أن z[0] و z[2] لا يُحرران أبدًا لأننا لا نُحررهما أبدًا. مثل هذا الـ bug يسمى memory leak وغالبًا سبب استهلاك ذاكرة مفرط للبرامج (فقط تخيل ماذا يحدث عندما نستدعي inner بشكل متكرر في loop). قد يبدو هذا سيئًا، لكن هناك أنواع أكثر خطورة من الـ bugs التي يمكن أن تحدث مع التخصيص الديناميكي.
🔗الأخطاء الشائعة
بجانب memory leaks، التي مؤسفة لكنها لا تجعل البرنامج قابلًا للمهاجمين، هناك نوعان شائعان من الـ bugs بعواقب أكثر خطورة:
- عندما نستمر عن طريق الخطأ في استخدام متغير بعد استدعاء
deallocateعليه، لدينا ما يسمى use-after-free vulnerability. مثل هذا الـ bug يسبب undefined behavior ويمكن غالبًا استغلاله من قبل المهاجمين لتنفيذ كود عشوائي. - عندما نُحرر متغيرًا مرتين عن طريق الخطأ، لدينا double-free vulnerability. هذا إشكالي لأنه قد يُحرر allocation مختلف تم تخصيصه في نفس المكان بعد استدعاء
deallocateالأول. لذلك، يمكن أن يؤدي إلى use-after-free vulnerability مرة أخرى.
هذه الأنواع من vulnerabilities معروفة عمومًا، لذلك قد يتوقع المرء أن الناس قد تعلموا كيفية تجنبها حتى الآن. لكن لا، مثل هذه vulnerabilities لا تزال تُكتشف بانتظام، على سبيل المثال هذا use-after-free vulnerability في Linux (2019)، الذي سمح بتنفيذ كود عشوائي. بحث مثل use-after-free linux {current year} سيُنتج نتائج دائمًا تقريبًا. هذا يُظهر أن حتى أفضل المبرمجين ليسوا دائمًا قادرين على التعامل بشكل صحيح مع الذاكرة الديناميكية في المشاريع المعقدة.
لتجنب هذه المشاكل، العديد من اللغات مثل Java أو Python تدير الذاكرة الديناميكية تلقائيًا باستخدام تقنية تسمى garbage collection. الفكرة هي أن المبرمج لا يستدعي deallocate يدويًا أبدًا. بدلاً من ذلك، يُوقف البرنامج بانتظام ويُفحص بحثًا عن متغيرات heap غير مستخدمة، التي تُحرر تلقائيًا. لذلك، vulnerabilities أعلاه لا يمكن أن تحدث أبدًا. العيوب هي overhead الأداء للفحص الدوري وأوقات التوقف الطويلة المحتملة.
يأخذ Rust نهجًا مختلفًا للمشكلة: يستخدم مفهومًا يسمى ownership قادر على فحص صحة عمليات الذاكرة الديناميكية وقت التجميع. لذلك، لا حاجة لـ garbage collection لتجنب vulnerabilities المذكورة، مما يعني أنه لا overhead أداء. ميزة أخرى لهذا النهج أن المبرمج لا يزال لديه تحكم دقيق في استخدام الذاكرة الديناميكية، تمامًا مثل C أو C++.
🔗التخصيص في Rust
بدلاً من ترك الم♲رمع يستدعي allocate و deallocate يدويًا، توفر مكتبة Rust القياسية أنواع تجريدية تستدعي هذه الدوال ضمنيًا. النوع الأهم هو Box، الذي هو تجريد لقيمة مُخصصة على heap. يوفر دالة بناء Box::new تأخذ قيمة، تستدعي allocate بحجم القيمة، ثم تنقل القيمة إلى slot المُخصص حديثًا على heap. لتحرير ذاكرة heap مرة أخرى، ينفذ نوع Box trait [Drop] لاستدعاء deallocate عندما يخرج من النطاق:
{
let z = Box::new([1,2,3]);
[…]
} // z goes out of scope and `deallocate` is called
هذا النمط له اسم غريب resource acquisition is initialization (أو RAII باختصار). نشأ في C++، حيث يُستخدم لتنفيذ نوع تجريد مشابه يسمى std::unique_ptr.
مثل هذا النوع وحده لا يكفي لمنع جميع use-after-free bugs لأن المبرمجين لا يزالون بإمكانهم الاحتفاظ بمراجع بعد خروج Box من النطاق وتحرير ذاكرة heap المقابلة:
let x = {
let z = Box::new([1,2,3]);
&z[1]
}; // z goes out of scope and `deallocate` is called
println!("{}", x);
هنا يأتي دور ownership في Rust. يُعيّن lifetime مجردًا لكل مرجع، الذي هو النطاق الذي يكون فيه المرجع صالحًا. في المثال أعلاه، مرجع x أُخذ من مصفوفة z، لذلك يصبح غير صالح بعد خروج z من النطاق. عندما تشغّل المثال أعلاه على playground ترى أن مترجم Rust يرمي خطأ بالفعل:
error[E0597]: `z[_]` does not live long enough
--> src/main.rs:4:9
|
2 | let x = {
| - borrow later stored here
3 | let z = Box::new([1,2,3]);
| - binding `z` declared here
4 | &z[1]
| ^^^^^ borrowed value does not live long enough
5 | }; // z goes out of scope and `deallocate` is called
| - `z[_]` dropped here while still borrowed
مصطلحات قد تكون محيرة في البداية. أخذ مرجع لقيمة يسمى borrowing للقيمة لأنه مشابه للاقتراض في الحياة الحقيقية: لديك وصول مؤقت للكائن لكن تحتاج لإعادته في وقت ما، ويجب ألا تدمره. بالتحقق من أن جميع borrows تنتهي قبل تدمير الكائن، يمكن لمترجم Rust ضمان عدم حدوث use-after-free.
نظام ownership في Rust يذهب أبعد، مانعًا ليس فقط use-after-free bugs لكن مقدمًا أيضًا memory safety كاملة، كما تفعل لغات garbage collected مثل Java أو Python. بالإضافة، يضمن thread safety وبالتالي حتى أمن أكثر من تلك اللغات في كود multi-threaded. والأهم من ذلك، كل هذه الفحوصات تحدث وقت التجميع، لذلك لا overhead وقت التشغيل مقارنة بإدارة الذاكرة المكتوبة يدويًا في C.
🔗حالات الاستخدام
نعرف الآن أساسيات dynamic memory allocation في Rust، لكن متى يجب استخدامها؟ لقد وصلنا بعيدًا جدًا مع نواتنا بدون dynamic memory allocation، فلماذا نحتاجها الآن؟
أولاً، dynamic memory allocation يأتي دائمًا مع بعض overhead أداء لأننا نحتاج لإيجاد slot حر على heap لكل allocation. لهذا السبب، local variables مفضلة بشكل عام، خاصة في كود النواة الحساس للأداء. ومع ذلك، هناك حالات يكون فيها dynamic memory allocation هو الخيار الأفضل.
كقاعدة أساسية، الذاكرة الديناميكية مطلوبة للمتغيرات التي لها lifetime ديناميكي أو حجم متغير. النوع الأهم بـ lifetime ديناميكي هو Rc، الذي يعد المراجع إلى قيمته المغلفة ويحررها بعد أن تخرج جميع المراجع من النطاق. أمثلة لأنواع بحجم متغير هي Vec و String و collection types أخرى تنمو ديناميكيًا عند إضافة عناصر أكثر. تعمل هذه الأنواع بتخصيص مساحة ذاكرة أكبر عندما تمتلئ، نسخ جميع العناصر إليها، ثم تحرير allocation القديم.
لنواتنا، سنحتاج بشكل أساسي collection types، على سبيل المثال، لتخزين قائمة المهام النشطة عند تنفيذ multitasking في مقالات مستقبلية.
🔗واجهة المخصص
الخطوة الأولى في تنفيذ heap allocator هي إضافة dependency على مكتبة alloc المدمجة. مثل مكتبة core، هي مجموعة فرعية من مكتبة القياسية تحتوي بالإضافة على أنواع التخصيص والجمع. لإضافة dependency على alloc، نضيف ما يلي إلى lib.rs:
// in src/lib.rs
extern crate alloc;
على عكس dependencies العادية، لا نحتاج لتعديل Cargo.toml. السبب هو أن مكتبة alloc تأتي مع مترجم Rust كجزء من مكتبة القياسية، لذلك المترجم يعرف بالفعل عن المكتبة. بإضافة extern crate هذه، نحدد أن المترجم يجب أن يحاول تضمينها. (تاريخيًا، كانت جميع dependencies تحتاج extern crate، الذي هو الآن اختياري).
بما أننا نجمع لـ target مخصص، لا نستطيع استخدام النسخة المجمعة مسبقًا من alloc المتوفرة مع تثبيت Rust. بدلاً من ذلك، نحتاج لإخبار cargo بإعادة تجميع المكتبة من source. يمكننا ذلك بإضافتها إلى مصفوفة unstable.build-std في ملف .cargo/config.toml:
# in .cargo/config.toml
[unstable]
build-std = ["core", "compiler_builtins", "alloc"]
الآن سيُعيد المترجم تجميع وتضمين مكتبة alloc في نواتنا.
سبب أن مكتبة alloc معطلة افتراضيًا في crates #[no_std] هو أن لها متطلبات إضافية. عندما نحاول تجميع مشروعنا الآن، سترى هذه المتطلبات كأخطاء:
error: no global memory allocator found but one is required; link to std or add
#[global_allocator] to a static item that implements the GlobalAlloc trait.
الخطأ يحدث لأن مكتبة alloc تحتاج heap allocator، الذي هو كائن يوفر دوال allocate و deallocate. في Rust، heap allocators تُوصف بـ trait GlobalAlloc، المذكور في رسالة الخطأ. لتعيين heap allocator لـ crate، يجب تطبيق السمة #[global_allocator] على متغير static ينفذ trait GlobalAlloc.
🔗السمة GlobalAlloc
يحدد trait GlobalAlloc الدوال التي يجب أن يوفرها heap allocator. Trait خاص لأنه نادرًا ما يُستخدم مباشرة من قبل المبرمج. بدلاً من ذلك، سيُدرج المترجم تلقائيًا استدعاءات مناسبة لـ trait methods عند استخدام أنواع التخصيص والجمع من alloc.
بما أننا سنحتاج لتنفيذ Trait لجميع أنواع المخصصات لدينا، يستحق إلقاء نظرة أقرب على إعلانه:
pub unsafe trait GlobalAlloc {
unsafe fn alloc(&self, layout: Layout) -> *mut u8;
unsafe fn dealloc(&self, ptr: *mut u8, layout: Layout);
unsafe fn alloc_zeroed(&self, layout: Layout) -> *mut u8 { ... }
unsafe fn realloc(
&self,
ptr: *mut u8,
layout: Layout,
new_size: usize
) -> *mut u8 { ... }
}
يحدد الدالتين المطلوبتين alloc و dealloc، المقابلتين لدالتَي allocate و deallocate اللتين استخدمناهما في أمثلتنا:
- دالة
allocتأخذ instanceLayoutكوسيطة، الذي يصف الحجم والمحاذاة المطلوبين للذاكرة المُخصصة. تُعيد raw pointer إلى أول byte من كتلة الذاكرة المُخصصة. بدلاً من قيمة خطأ صريحة، تُعيد دالةallocnull pointer للإشارة إلى خطأ allocation. هذا غير idiomatic بعض الشيء، لكنه ميزة أن تغليف allocators نظام موجودة سهل لأنها تستخدم نفس الاصطلاح. - دالة
deallocهي counterpart ومسؤولة عن تحرير كتلة ذاكرة مرة أخرى. تستقبل وسيطتين: المؤشر الذي أعادتهallocوLayoutالذي استُخدم لل allocation.
يحدد Trait أيضًا الدالتين alloc_zeroed و realloc بimplementations افتراضية:
- دالة
alloc_zeroedمعادلة لاستدعاءallocثم تصفير كتلة الذاكرة المُخصصة، الذي هو بالضبط ما يفعله implementation الافتراضي. يمكن لـ allocator implementation تجاوز implementations الافتراضية بـ implementation مخصص أكثر كفاءة إذا كان ممكنًا. - دالة
reallocتسمح بتكبير أو تصغير allocation. implementation الافتراضي يخصص كتلة ذاكرة بالحجم المطلوي وينسخ جميع المحتوى من allocation السابق. مرة أخرى، يمكن لـ allocator implementation تقديم implementation أكثر كفاءة لهذه الدالة، على سبيل المثال بتكبير/تصغير allocation في المكان إذا كان ممكنًا.
🔗عدم الأمان
شيء واحد لاحظه هو أن كلًا من Trait نفسه وجميع trait methods معلنة كـ unsafe:
- سبب إعلان Trait كـ
unsafeهو أن المبرمج يجب أن يضمن صحة trait implementation لنوع allocator. على سبيل المثال، يجب أن لا تُعيد دالةallocكتلة ذاكرة مستخدمة في مكان آخر لأن هذا سيسبب undefined behavior. - بالمثل، سبب أن الدوال
unsafeهو أن المستدعي يجب أن يضمن various invariants عند استدعاء الدوال، على سبيل المثال، أنLayoutالممررة إلىallocتحدد حجمًا غير صفري. هذا ليس ذا صلة في الممارسة العملية لأن الدوال تُستدعى عادةً مباشرة من قبل المترجم، الذي يضمن استيفاء المتطلبات.
🔗مخصص وهمي
الآن نعرف ما يجب أن يوفره نوع allocator، يمكننا إنشاء dummy allocator بسيط. لذلك، نُنشئ module allocator جديدًا:
// in src/lib.rs
pub mod allocator;
Dummy allocator لدينا يفعل الحد الأدنى لتنفيذ Trait ويعيد دائمًا خطأ عند استدعاء alloc. يبدو كالتالي:
// in src/allocator.rs
use alloc::alloc::{GlobalAlloc, Layout};
use core::ptr::null_mut;
pub struct Dummy;
unsafe impl GlobalAlloc for Dummy {
unsafe fn alloc(&self, _layout: Layout) -> *mut u8 {
null_mut()
}
unsafe fn dealloc(&self, _ptr: *mut u8, _layout: Layout) {
panic!("dealloc should be never called")
}
}
الـ struct لا يحتاج أي حقول، لذلك نُنشئه كـ zero-sized type. كما ذكر أعلاه، نُعيد دائمًا null pointer من alloc، المقابل لخطأ allocation. بما أن المخصص لا يُعيد أي ذاكرة أبدًا، استدعاء dealloc يجب ألا يحدث أبدًا. لهذا السبب، نُ panic ببساطة في دالة dealloc. الدالتان alloc_zeroed و realloc لهما implementations افتراضية، لذلك لا نحتاج تقديم implementations لهما.
الآن لدينا allocator بسيط، لكن لا نزال نحتاج لإخبار مترجم Rust أنه يجب استخدام هذا Allocator. هنا يأتي دور السمة #[global_allocator].
🔗السمة #[global_allocator]
السمة #[global_allocator] تخبر مترجم Rust أي instance allocator يجب أن يُستخدم كـ global heap allocator. السمة قابلة للتطبيق فقط على static ينفذ trait GlobalAlloc. لنُسجّل instance من Dummy allocator كـ global allocator:
// in src/allocator.rs
#[global_allocator]
static ALLOCATOR: Dummy = Dummy;
بما أن Dummy allocator هو zero-sized type، لا نحتاج تحديد أي حقول في تعبير التهيئة.
مع هذا static، يجب أن تُصلح أخطاء التجميع. الآن يمكننا استخدام أنواع التخصيص والجمع من alloc. على سبيل المثال، يمكننا استخدام Box لتخصيص قيمة على heap:
// in src/main.rs
extern crate alloc;
use alloc::boxed::Box;
fn kernel_main(boot_info: &'static BootInfo) -> ! {
// […] print "Hello World!", call `init`, create `mapper` and `frame_allocator`
let x = Box::new(41);
// […] call `test_main` in test mode
println!("It did not crash!");
blog_os::hlt_loop();
}
لاحظ أننا نحتاج لتحديد extern crate alloc في main.rs أيضًا. هذا مطلوب لأن أجزاء lib.rs و main.rs تُعامل كـ crates منفصلة. ومع ذلك، لا نحتاج لإنشاء #[global_allocator] static أخرى لأن global allocator ينطبق على جميع crates في المشروع. في الواقع، تحديد allocator إضافية في crate أخرى سيكون خطأ.
عندما نشغّل الكود أعلاه، نرى أن panic يحدث:
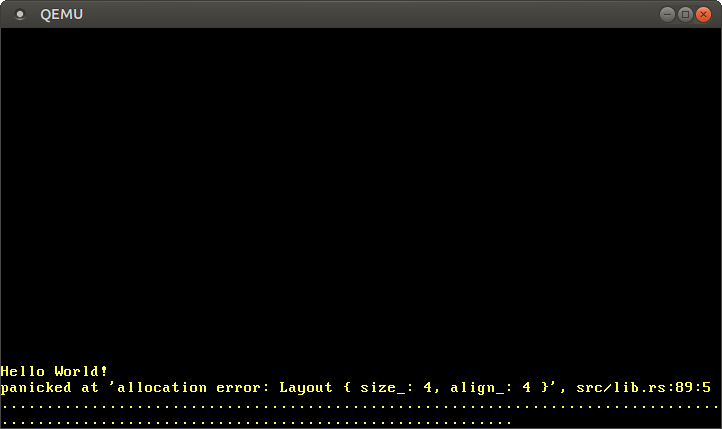
يحدث panic لأن دالة Box::new تستدعي ضمنيًا دالة alloc لـ global allocator. Dummy allocator يُعيد دائمًا null pointer، لذلك كل allocation يفشل. لإصلاح هذا، نحتاج لإنشاء allocator يُعيد ذاكرة قابلة للاستخدام فعلًا.
🔗إنشاء Heap للنواة
قبل أن نُنشئ allocator مناسب، نحتاج أولاً لإنشاء منطقة ذاكرة heap يمكن للمخصص تخصيص ذاكرة منها. لذلك، نحتاج لتحديد نطاق ذاكرة افتراضي لمنطقة heap ثم تعيين هذه المنطقة إلى physical frames. راجع “Introduction To Paging” لنظرية عامة على الذاكرة الافتراضية و page tables.
الخطوة الأولى هي تحديد منطقة ذاكرة افتراضية لـ heap. يمكننا اختيار أي نطاق عنوان افتراضي نريده، طالما أنه غير مستخدم بالفعل لمنطقة ذاكرة مختلفة. لنُحدد كذاكرة starting at address 0x_4444_4444_0000 حتى نتمكن بسهولة من التعرف على heap pointer لاحقًا:
// in src/allocator.rs
pub const HEAP_START: usize = 0x_4444_4444_0000;
pub const HEAP_SIZE: usize = 100 * 1024; // 100 KiB
نُعين حجم heap إلى 100 KiB الآن. إذا احتجنا مساحة أكثر في المستقبل، يمكننا زيادتها ببساطة.
إذا حاولنا استخدام منطقة heap هذه الآن، سيحدث page fault لأن منطقة الذاكرة الافتراضية غير مُعيّنة إلى ذاكرة فيزيائية بعد. لحل هذا، نُنشئ دالة init_heap تُعيّن صفحات heap باستخدام Mapper API الذي قدمناه في مقال “Paging Implementation”:
// in src/allocator.rs
use x86_64::{
structures::paging::{
mapper::MapToError, FrameAllocator, Mapper, Page, PageTableFlags, Size4KiB,
},
VirtAddr,
};
pub fn init_heap(
mapper: &mut impl Mapper<Size4KiB>,
frame_allocator: &mut impl FrameAllocator<Size4KiB>,
) -> Result<(), MapToError<Size4KiB>> {
let page_range = {
let heap_start = VirtAddr::new(HEAP_START as u64);
let heap_end = heap_start + HEAP_SIZE - 1u64;
let heap_start_page = Page::containing_address(heap_start);
let heap_end_page = Page::containing_address(heap_end);
Page::range_inclusive(heap_start_page, heap_end_page)
};
for page in page_range {
let frame = frame_allocator
.allocate_frame()
.ok_or(MapToError::FrameAllocationFailed)?;
let flags = PageTableFlags::PRESENT | PageTableFlags::WRITABLE;
unsafe {
mapper.map_to(page, frame, flags, frame_allocator)?.flush()
};
}
Ok(())
}
الدالة تأخذ mutable references إلى Mapper و FrameAllocator، كلاهما محدود إلى 4 KiB pages باستخدام Size4KiB كـ generic parameter. نوع عودة الدالة هو Result مع نوع الوحدة () كـ success variant و MapToError كـ error variant، الذي هو نوع الخطأ الذي تُعيده دالة Mapper::map_to. إعادة استخدام نوع الخطأ منطقي هنا لأن دالة map_to هي مصدر الأخطاء الرئيسي في هذه الدالة.
يمكن تقسيم التنفيذ إلى جزأين:
-
إنشاء نطاق page: لإنشاء نطاق pages التي نريد تعيينها، نحول مؤشر
HEAP_STARTإلى نوعVirtAddr. ثم نحسب عنوان نهاية heap بإضافةHEAP_SIZE. نريد bound inclusive (عنوان آخر byte لـ heap)، لذلك نطرح 1. ثم نحول العناوين إلى أنواعPageباستخدام دالةcontaining_address. أخيرًا، نُنشئ نطاق page من start و end pages باستخدام دالةPage::range_inclusive. -
تعيين pages: الخطوة الثانية هي تعيين جميع pages لنطاق page الذي أنشأناه للتو. لذلك، نمرر عبر هذه pages باستخدام loop
for. لكل page، نفعل ما يلي:-
نخصص physical frame يجب تعيين page إليها باستخدام دالة
FrameAllocator::allocate_frame. هذه الدالة تُعيدNoneعندما لا تبقى frames. نتعامل مع تلك الحالة بتعيينها إلى خطأMapToError::FrameAllocationFailedعبر دالةOption::ok_orثم تطبيق question mark operator للعودة المبكرة في حالة الخطأ. -
نعين flag
PRESENTالمطلوبة و flagWRITABLEللصفحة. مع هذه flags، كلتا القراءة والكتابة مسموحتان، الذي منطقي لذاكرة heap. -
نستخدم دالة
Mapper::map_toلإنشاء التعيين في page table النشطة. الدالة قد تفشل، لذلك نستخدم question mark operator مرة أخرى لإعادة الخطأ إلى المستدعي. عند النجاح، تُعيد الدالة instanceMapperFlushالتي يمكننا استخدامها لتحديث translation lookaside buffer باستخدام دالةflush.
-
الخطوة الأخيرة هي استدعاء هذه الدالة من kernel_main:
// in src/main.rs
fn kernel_main(boot_info: &'static BootInfo) -> ! {
use blog_os::allocator; // new import
use blog_os::memory::{self, BootInfoFrameAllocator};
println!("Hello World{}", "!");
blog_os::init();
let phys_mem_offset = VirtAddr::new(boot_info.physical_memory_offset);
let mut mapper = unsafe { memory::init(phys_mem_offset) };
let mut frame_allocator = unsafe {
BootInfoFrameAllocator::init(&boot_info.memory_map)
};
// new
allocator::init_heap(&mut mapper, &mut frame_allocator)
.expect("heap initialization failed");
let x = Box::new(41);
// […] call `test_main` in test mode
println!("It did not crash!");
blog_os::hlt_loop();
}
نُظهر الدالة الكاملة للسياق هنا. الأسطر الجديدة الوحيدة هي import blog_os::allocator واستدعاء دالة allocator::init_heap. في حالة عودة دالة init_heap بخطأ، نُ panic باستخدام دالة Result::expect لأنه لا توجد طريقة منطقية لنا لمعالجة هذا الخطأ حاليًا.
الآن لدينا منطقة ذاكرة heap مُعيّنة جاهزة للاستخدام. استدعاء Box::new لا يزال يستخدم Dummy allocator القديم، لذلك سترى خطأ “out of memory” عندما تشغله. لنصلح هذا باستخدام allocator مناسب.
🔗استخدام مكتبة مخصص
بما أن تنفيذ allocator معقد بعض الشيء، نبدأ باستخدام external allocator crate. سنتعلم كيفية تنفيذ allocator خاص بنا في المقال التالي.
allocator crate بسيط لتطبيقات no_std هو مكتبة linked_list_allocator. اسمها يأتي من حقيقة أنها تستخدم linked list data structure لتتبع مناطق الذاكرة المُحررة. راجع المقال التالي لشرح أكثر تفصيلاً لهذا النهج.
لاستخدام المكتبة، نحتاج أولاً لإضافة dependency في Cargo.toml:
# in Cargo.toml
[dependencies]
linked_list_allocator = "0.9.0"
ثم يمكننا استبدال dummy allocator بـ allocator المُوفر من المكتبة:
// in src/allocator.rs
use linked_list_allocator::LockedHeap;
#[global_allocator]
static ALLOCATOR: LockedHeap = LockedHeap::empty();
الـ struct يسمى LockedHeap لأنها تستخدم نوع spinning_top::Spinlock للمزامنة. هذا مطلوب لأن عدة threads يمكنها الوصول إلى static ALLOCATOR في نفس الوقت. كما دائمًا، عند استخدام spinlock أو mutex، نحتاج للحذر من عدم إثارة deadlock عن طريق الخطأ. هذا يعني أنه يجب ألا نفعل أي allocations في interrupt handlers، لأنها يمكن أن تعمل في وقت عشوائي وقد تقاطع allocation جارية.
تعيين LockedHeap كـ global allocator ليس كافيًا. السبب هو أننا نستخدم دالة بناء empty، التي تُنشئ allocator بدون أي backing memory. مثل dummy allocator، تُعيد دائمًا خطأ عند alloc. لإصلاح هذا، نحتاج لتهيئة Allocator بعد إنشاء heap:
// in src/allocator.rs
pub fn init_heap(
mapper: &mut impl Mapper<Size4KiB>,
frame_allocator: &mut impl FrameAllocator<Size4KiB>,
) -> Result<(), MapToError<Size4KiB>> {
// […] map all heap pages to physical frames
// new
unsafe {
ALLOCATOR.lock().init(HEAP_START, HEAP_SIZE);
}
Ok(())
}
نستخدم دالة lock على inner spinlock لنوع LockedHeap للحصول على مرجع حصري إلى instance Heap المغلفة، التي نستدعي عليها دالة init بحدود heap كوسيطات. لأن دالة init تحاول بالفعل الكتابة إلى ذاكرة heap، يجب أن نُهيئة heap فقط بعد تعيين صفحات heap.
بعد تهيئة heap، يمكننا الآن استخدام جميع أنواع التخصيص والجمع من مكتبة alloc المدمجة بدون خطأ:
// in src/main.rs
use alloc::{boxed::Box, vec, vec::Vec, rc::Rc};
fn kernel_main(boot_info: &'static BootInfo) -> ! {
// […] initialize interrupts, mapper, frame_allocator, heap
// allocate a number on the heap
let heap_value = Box::new(41);
println!("heap_value at {:p}", heap_value);
// create a dynamically sized vector
let mut vec = Vec::new();
for i in 0..500 {
vec.push(i);
}
println!("vec at {:p}", vec.as_slice());
// create a reference counted vector -> will be freed when count reaches 0
let reference_counted = Rc::new(vec![1, 2, 3]);
let cloned_reference = reference_counted.clone();
println!("current reference count is {}", Rc::strong_count(&cloned_reference));
core::mem::drop(reference_counted);
println!("reference count is {} now", Rc::strong_count(&cloned_reference));
// […] call `test_main` in test context
println!("It did not crash!");
blog_os::hlt_loop();
}
مثال الكود يُظهر بعض استخدامات أنواع Box و Vec و Rc. لأنواع Box و Vec، نطبع heap pointers الأساسية باستخدام {:p} formatting specifier. لإظهار Rc، نُنشئ قيمة heap بـ reference-counted ونستخدم دالة Rc::strong_count لطباعة reference count الحالية قبل وبعد إسقاط instance (باستخدام core::mem::drop).
عندما نشغله، نرى ما يلي:
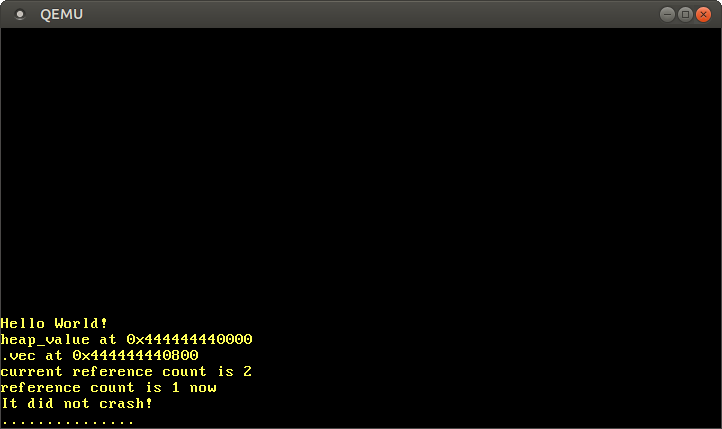
كما هو متوقع، نرى أن قيم Box و Vec تعيشان على heap، كما يشير المؤشر starting with prefix 0x_4444_4444_*. قيمة reference-counted تتصرف أيضًا كما هو متوقع، مع reference count being 2 بعد استدعاء clone، و 1 مرة أخرى بعد إسقاط أحد instances.
سبب أن vector يبدأ عند offset 0x800 ليس أن boxed value بحجم 0x800 bytes، بل reallocations التي تحدث عندما يحتاج vector لزيادة capacity. على سبيل المثال، عندما يكون capacity لـ vector 32 ونحاول إضافة العنصر التالي، يخصص vector backing array جديدة بـ capacity 64 خلف الكواليس وينسخ جميع العناصر إليها. ثم يحرر allocation القديم.
بالطبع، هناك المزيد من أنواع التخصيص والجمع في مكتبة alloc يمكننا استخدامها جميعًا الآن في نواتنا، بما في ذلك:
- المؤشر بـ reference-counted thread-safe
Arc - نوع السلسلة المملوك
Stringو macroformat! LinkedList- ring buffer القابل للتكبير
VecDeque BinaryHeappriority queueBTreeMapوBTreeSet
هذه الأنواع ستكون مفيدة جدًا عندما نريد تنفيذ قوائم threads و scheduling queues أو دعم async/await.
🔗Adding a Test
لضمان عدم كسر كود allocation الجديد عن طريق الخطأ، يجب إضافة integration test لذلك. نبدأ بإنشاء ملف tests/heap_allocation.rs جديد بالمحتوى التالي:
// in tests/heap_allocation.rs
#![no_std]
#![no_main]
#![feature(custom_test_frameworks)]
#![test_runner(blog_os::test_runner)]
#![reexport_test_harness_main = "test_main"]
extern crate alloc;
use bootloader::{entry_point, BootInfo};
use core::panic::PanicInfo;
entry_point!(main);
fn main(boot_info: &'static BootInfo) -> ! {
unimplemented!();
}
#[panic_handler]
fn panic(info: &PanicInfo) -> ! {
blog_os::test_panic_handler(info)
}
نعيد استخدام دالتَي test_runner و test_panic_handler من lib.rs. بما أننا نريد اختبار allocations، نفعل مكتبة alloc عبر extern crate alloc. لمزيد من المعلومات حول test boilerplate، راجع مقال Testing.
تنفيذ دالة main يبدو كالتالي:
// in tests/heap_allocation.rs
fn main(boot_info: &'static BootInfo) -> ! {
use blog_os::allocator;
use blog_os::memory::{self, BootInfoFrameAllocator};
use x86_64::VirtAddr;
blog_os::init();
let phys_mem_offset = VirtAddr::new(boot_info.physical_memory_offset);
let mut mapper = unsafe { memory::init(phys_mem_offset) };
let mut frame_allocator = unsafe {
BootInfoFrameAllocator::init(&boot_info.memory_map)
};
allocator::init_heap(&mut mapper, &mut frame_allocator)
.expect("heap initialization failed");
test_main();
loop {}
}
مشابهة جدًا لدالة kernel_main في main.rs، مع أن الاختلافات أننا لا نستدعي println ولا نتضمن أي allocations مثال ونستدعي test_main بدون قيد.
الآن نحن مستعدون لإضافة عدة test cases. أولاً، نضيف اختبار ينفذ بعض allocations بسيطة باستخدام Box ويتحقق من القيم المُخصصة لضمان عمل allocations الأساسية:
// in tests/heap_allocation.rs
use alloc::boxed::Box;
#[test_case]
fn simple_allocation() {
let heap_value_1 = Box::new(41);
let heap_value_2 = Box::new(13);
assert_eq!(*heap_value_1, 41);
assert_eq!(*heap_value_2, 13);
}
الأهم، هذا الاختبار يتحقق من عدم حدوث خطأ allocation.
ثم نبني vector كبير بشكل تكراري، لاختبار كلًا من allocations الكبيرة و allocations المتعددة (بسبب reallocations):
// in tests/heap_allocation.rs
use alloc::vec::Vec;
#[test_case]
fn large_vec() {
let n = 1000;
let mut vec = Vec::new();
for i in 0..n {
vec.push(i);
}
assert_eq!(vec.iter().sum::<u64>(), (n - 1) * n / 2);
}
نتحقق من المجموع بمقارنته بمعادلة n-th partial sum. هذا يعطينا ثقة أن القيم المُخصصة جميعها صحيحة.
كاختبار ثالث، نُنشئ عشرة آلاف allocation بعد بعضها:
// in tests/heap_allocation.rs
use blog_os::allocator::HEAP_SIZE;
#[test_case]
fn many_boxes() {
for i in 0..HEAP_SIZE {
let x = Box::new(i);
assert_eq!(*x, i);
}
}
هذا الاختبار يضمن أن المخصص يعيد استخدام الذاكرة المُحررة لallocations اللاحقة لأنه سينفد من الذاكرة بخلاف ذلك. قد يبدو هذا متطلبًا obvious لـ allocator، لكن هناك تصميمات allocators لا تفعل ذلك. مثال هو bump allocator design الذي سيُشرح في المقال التالي.
لنُشغّل integration test الجديد:
> cargo test --test heap_allocation
[…]
Running 3 tests
simple_allocation... [ok]
large_vec... [ok]
many_boxes... [ok]
جميع الاختبارات الثلاثة نجحت! يمكنك أيضًا استدعاء cargo test (بدون وسيطة --test) لتشغيل جميع unit و integration tests.
🔗Summary
قدم هذا المقال مقدمة عن dynamic memory وشرح لماذا وأين هو مطلوب. رأينا كيف يمنع borrow checker في Rust vulnerabilities الشائعة وتعلمنا كيف تعمل allocation API في Rust.
بعد إنشاء تنفيذ بسيط لـ allocator interface في Rust باستخدام dummy allocator، أنشأنا منطقة ذاكرة heap مناسبة لنواتنا. لذلك، حددنا نطاق عنوان افتراضي لـ heap ثم عيّننا جميع pages لذلك النطاق إلى physical frames باستخدام Mapper و FrameAllocator من المقال السابق.
أخيرًا، أضفنا dependency على linked_list_allocator لإضافة allocator مناسب لنواتنا. مع هذا Allocator، أصبحنا قادرين على استخدام Box و Vec وأنواع التخصيص والجمع الأخرى من مكتبة alloc.
🔗What’s next?
بينما أضفنا دعم heap allocation في هذا المقال، تركنا معظم العمل لمكتبة linked_list_allocator. المقال التالي سيُظهر بالتفصيل كيف يمكن تنفيذ allocator من scratch. سيُقدم عدة تصميمات allocators ممكنة، يُظهر كيفية تنفيذ نسخ بسيطة منها، ويشرح مزاياها وعيوبها.
التعليقات
هل لديك مشكلة، أو تريد مشاركة ملاحظات، أو مناقشة أفكار إضافية؟ لا تتردد في ترك تعليق هنا! يرجى الالتزام باللغة الإنجليزية واتباع مدونة سلوك Rust. يتم ربط هذا الخيط من التعليقات مباشرة بـ نقاش على GitHub، لذا يمكنك التعليق هناك أيضًا إذا أردت.
Instead of authenticating the giscus application, you can also comment directly on GitHub.
يفضل كتابة التعليقات باللغة الإنجليزية إن أمكن.